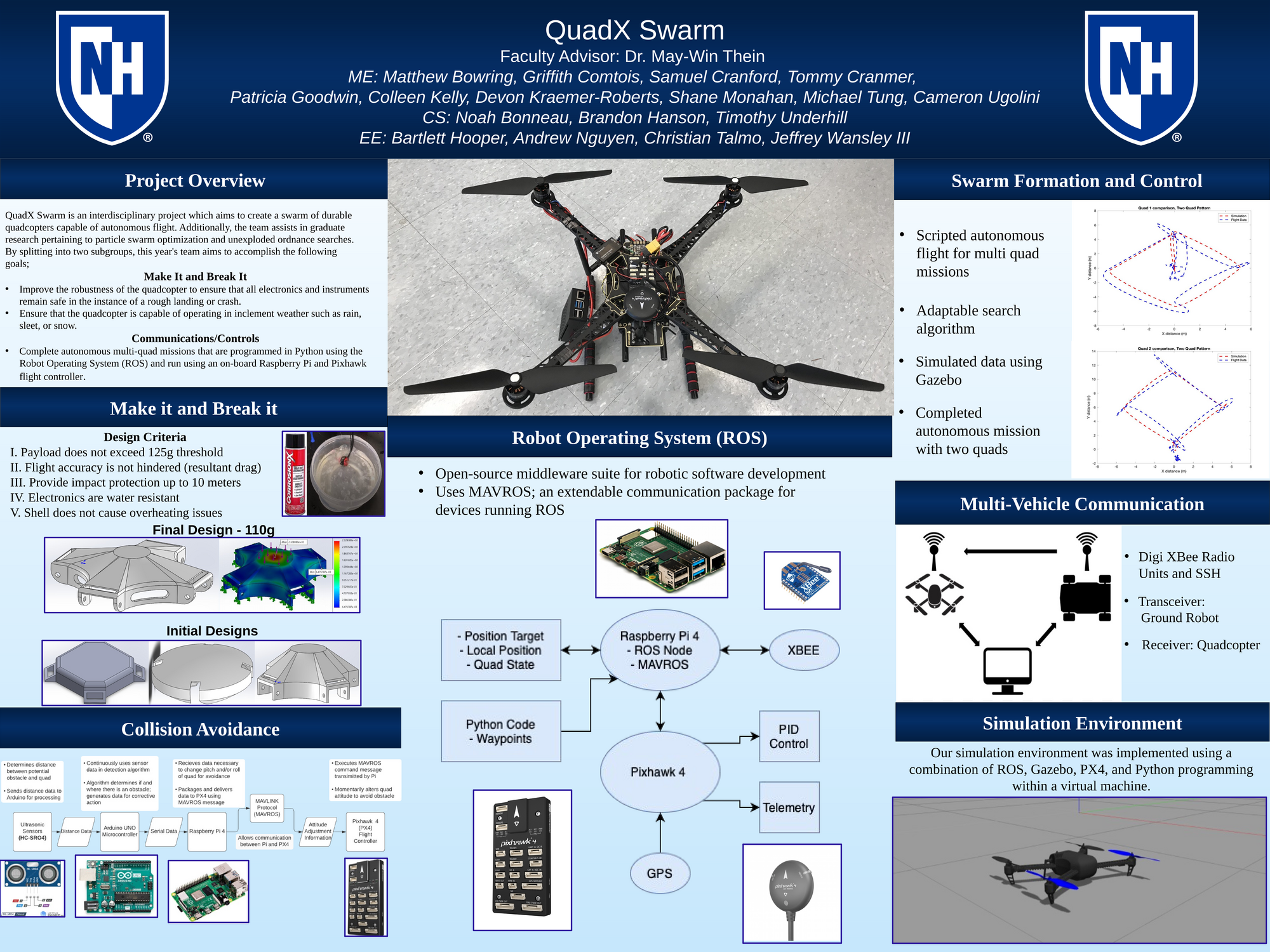
QuadX Swarm is an interdisciplinary project advised by Dr. May-Win Thein, which aims to create a swarm of durable quadcopters capable of autonomous flight. These quadcopters will also be capable of operating in inclement weather such as rain, sleet, or snow through the use of waterproofing spray and a protective shell on the main body. Autonomous quadcopter missions are programmed in Python using the Robot Operating System (ROS) and are run using an on-board Raspberry Pi and Pixhawk flight controller. QuadX also assists in graduate research pertaining to particle swarm optimization and unexploded ordnance searches.
Authors
First Name
Last Name
Cameron
Ugolini
Michael
Tung
Shane
Monahan,
Devon
Kraemer-Roberts
Colleen
Kelly
Patricia
Goodwin
Tommy
Cranmer
Samuel
Cranford
Griffith
Comtois
Matthew
Bowring
File Count: 1
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)