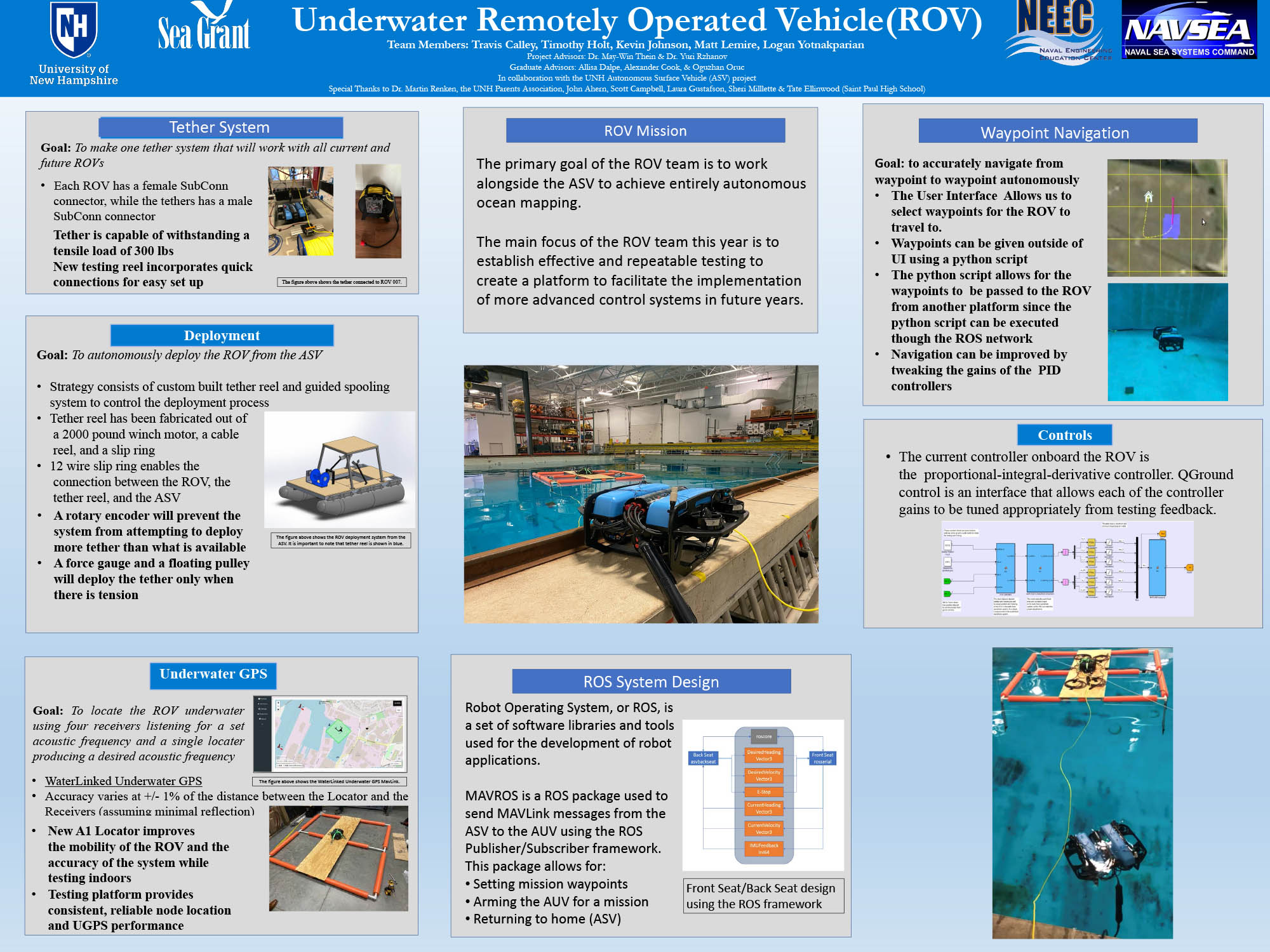
The ROV team works along side the Autonomous Surface Vehicle (ASV) team towards a common goal. The primary goal of the ASV/ROV teams is to create an autonomous surface vehicle (ASV) system that can be sent to perform a search pattern to map a section of ocean floor with sonar. When the ASV detects an object or location of interest, it will deploy the on-board AUV to take images of the area or object. One goal is to have the system capable of being added to any surface craft to give it autonomous capabilities.
Authors
First Name
Last Name
Travis
Calley
Matt
Lemire
Timothy
Holt
Kevin
Johnson
Logan
Yotnakparian
File Count: 1
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)