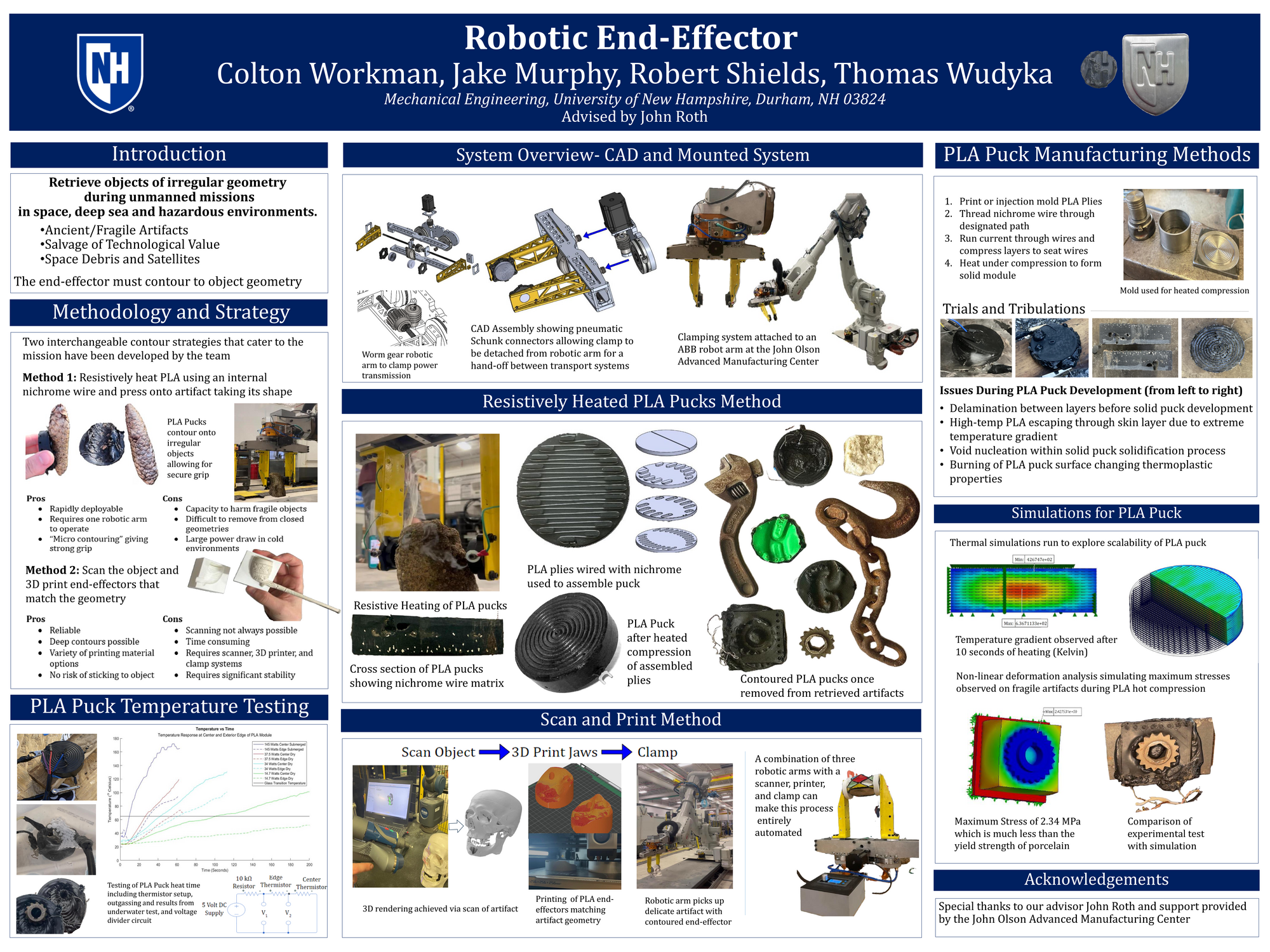
The department of defense needs a way to autonomously retrieve objects of unknown geometries. Our group has been tasked with making a clamping system with end-effectors that will securely grasp any object by contouring the object's shape. Our two solutions are scanning and 3D printing custom jaws and pressing hot PLA pucks onto the object, each method with their own strengths.
Authors
First Name
Last Name
Robert
Shields
Thomas
Wudyka
Colton
Workman
Jake
Murphy
File Count: 1
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)