Title:
Project MANTA RAY: Autonomous Surface Vehicle
Poster
Preview Converted Images may contain errors
Abstract
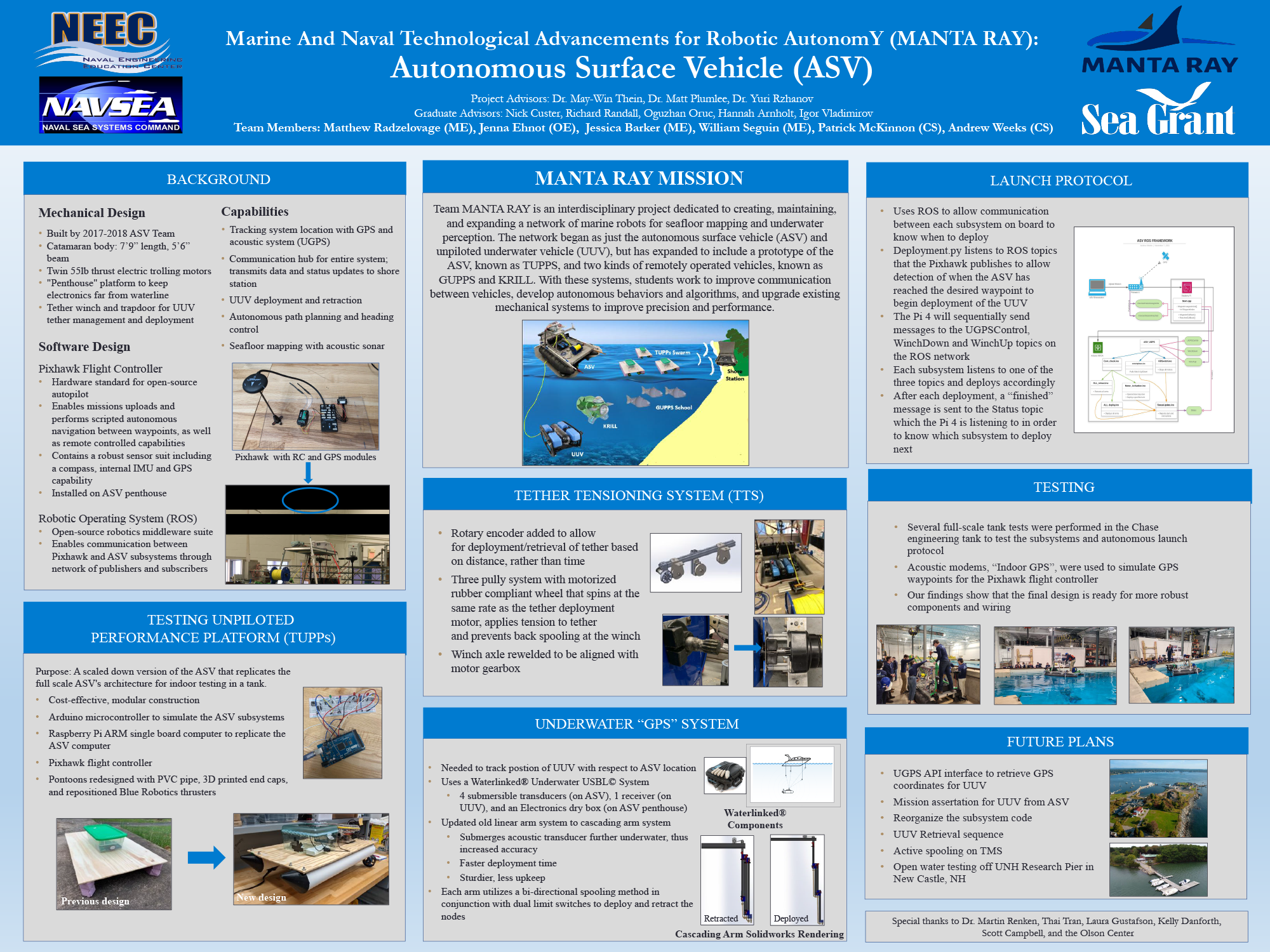
The Autonomous Surface Vehicle (ASV) is a subteam of the larger project MANTA RAY: Marine And Naval Technological Advancements for Robotic Autonomy. The project’s goal is to create a modular network of marine robots for missions such as seabed mapping or underwater surveying and inspection. Within this mission is an emphasis on the development of autonomous behavior and underwater perception and communication. The purpose of the ASV is to autonomously navigate a given path for seafloor mapping, as well as deploy and retract the Unpiloted Underwater Vehicle (UUV), another vehicle within MANTA RAY used for underwater observation. The ASV subteam’s objectives this year were to update the mechanical systems used for UUV deployment and recovery, and to develop an algorithm to autonomously activate these systems based on location data from the GPS.
Authors
| First Name |
Last Name |
|
Andrew
|
Weeks
|
|
Patrick
|
McKinnon
|
|
William
|
Seguin
|
|
Jessica
|
Barker
|
|
Matthew
|
Radzelovage
|
|
Jenna
|
Ehnot
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Ocean Engineering (ISE)
Added April 18, 2022, 10:39 p.m.
Updated April 11, 2023, 11:01 a.m.
See More Department Presentations Here