Title:
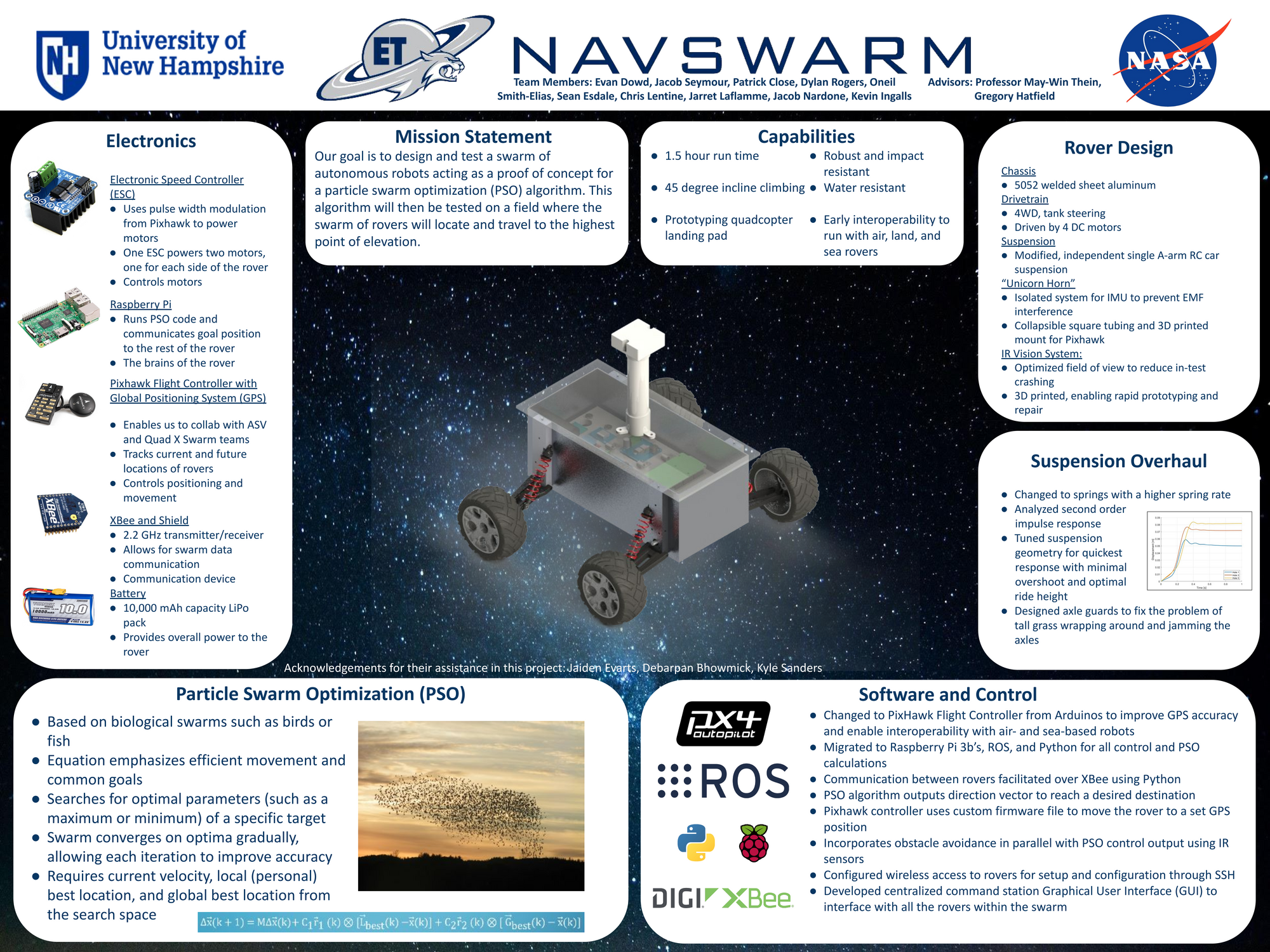
Extra-Terrestrial Navigational Swarm
Poster
Preview Converted Images may contain errors
Abstract
Extra-Terrestrial Navigational Swarm, better known as ET-NavSwarm, is a recurring senior project that works to utilize ground-based rovers to test particle swarm optimization algorithms. These rovers are designed to be lightweight and compact for ideal storage on interstellar launch vehicles. Upon reaching their destination, the rovers are designed to work as a swarm. A swarm is defined as a group of three or more rovers. This swarm will work together to find local maxima or minima, such as peak altitude or, theoretically, the highest concentration of the desired mineral. This year's team worked to design and manufacture the fourth-generation rovers and convert a swarm of five rovers to Pixhawk navigation.
Authors
| First Name |
Last Name |
|
Jacob
|
Nardone
|
|
Jarret
|
Laflamme
|
|
Kevin
|
Ingalls
|
|
Chris
|
Lentine
|
|
Dylan
|
Rogers
|
|
Sean
|
Esdale
|
|
Oneil
|
Smith-Elias
|
|
Jacob
|
Seymour
|
|
Evan
|
Dowd
|
|
Patrick
|
Close
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Mechanical Engineering (ISE)
Group Competition and Club Teams
Added April 18, 2022, 9:40 a.m.
Updated April 18, 2022, 9:43 a.m.
See More Department Presentations Here