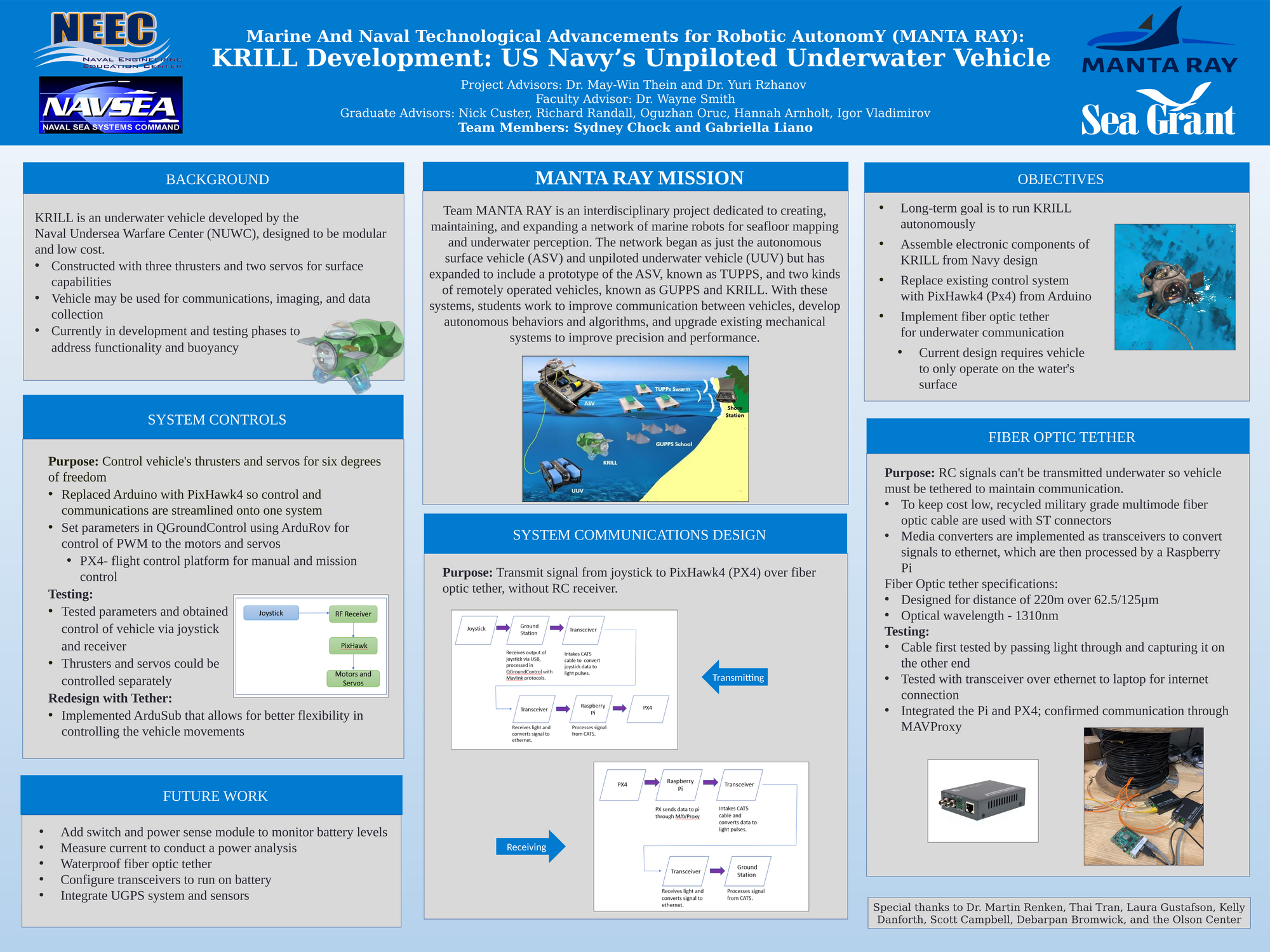
KRILL is an underwater vehicle developed by the Naval Undersea Warfare Center- Keyport (NUWC), designed to be modular and low cost. However, it is still in testing and redesign phases, as the vehicle only operates at the surface. This project focuses on improving and building upon the initial design of KRILL. For the vehicle to operate underwater, the joystick receiver must be replaced as the signal does not transmit through water. The solution for underwater operation is a fiber optic tether that was tested and implemented in this project. Additionally, the control system was redesigned to run on PixHawk for flexibility in vehicle control.
Authors
First Name
Last Name
Gabriella
Liano
Sydney
Chock
File Count: 2
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Electrical and Computer Engineering (ISE)