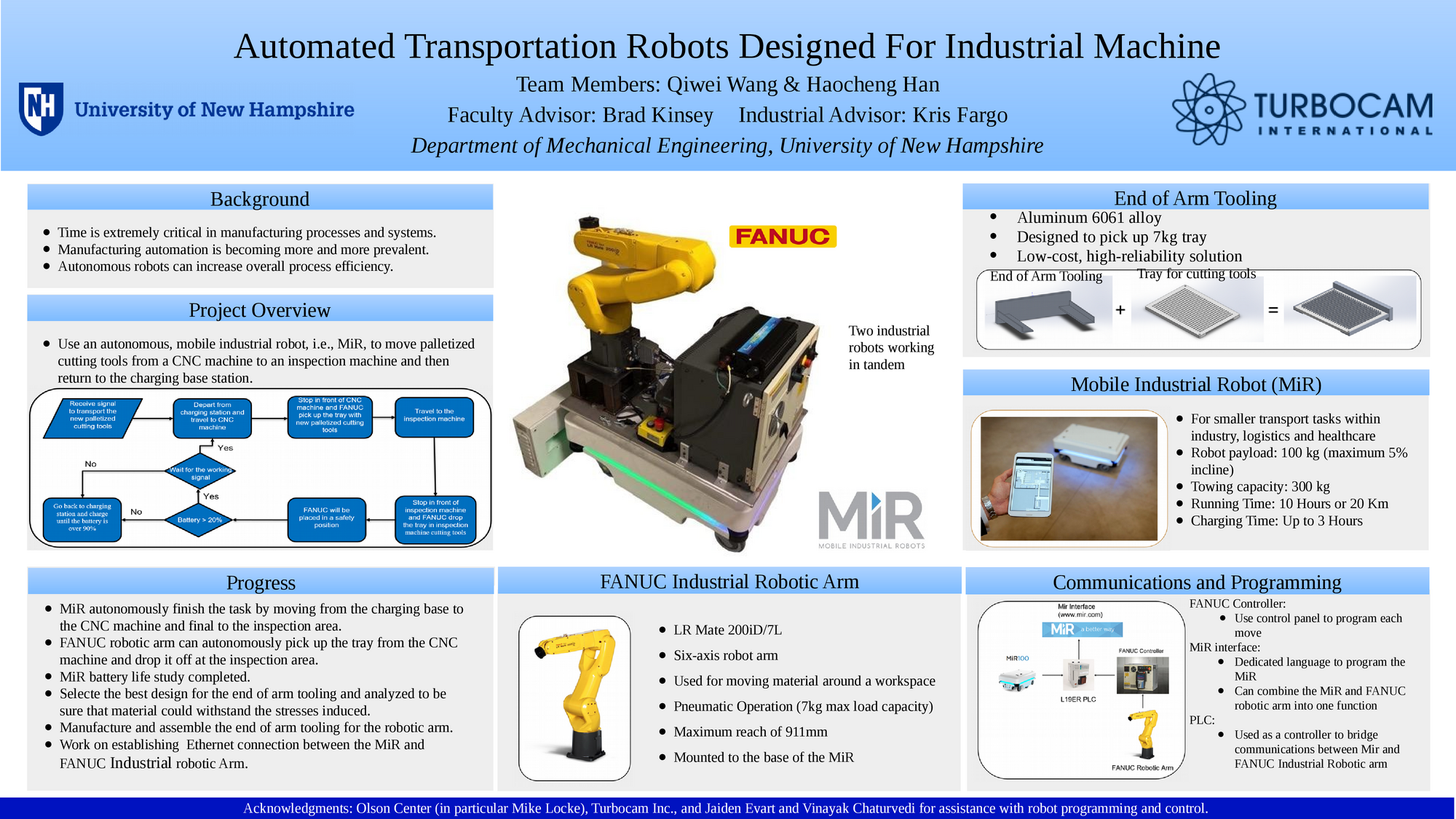
The Manufacturing Autonomous Robot project aims to demonstrate how an autonomous robot could work in a real manufacturing environment. The specific goal of this project is to use an autonomous robot to move palletized cutting tools from a grinding machine to an inspection machine and then return back to the charging base station. The autonomous robot is composed of two parts, a robot arm on the top and a mobile industrial robot on the bottom. The mobile industrial robot is like a car that moves items from one station to another, and the robot arm is used to grab palletized cutting tools and transfer them in the inspection machine.
Authors
First Name
Last Name
Qiwei
Wang
Haocheng
Han
File Count: 2
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)