Title:
Marine and Naval Technological Advancements for Robotic AutonomY (MANTA RAY): KRILL
Poster
Preview Converted Images may contain errors
Abstract
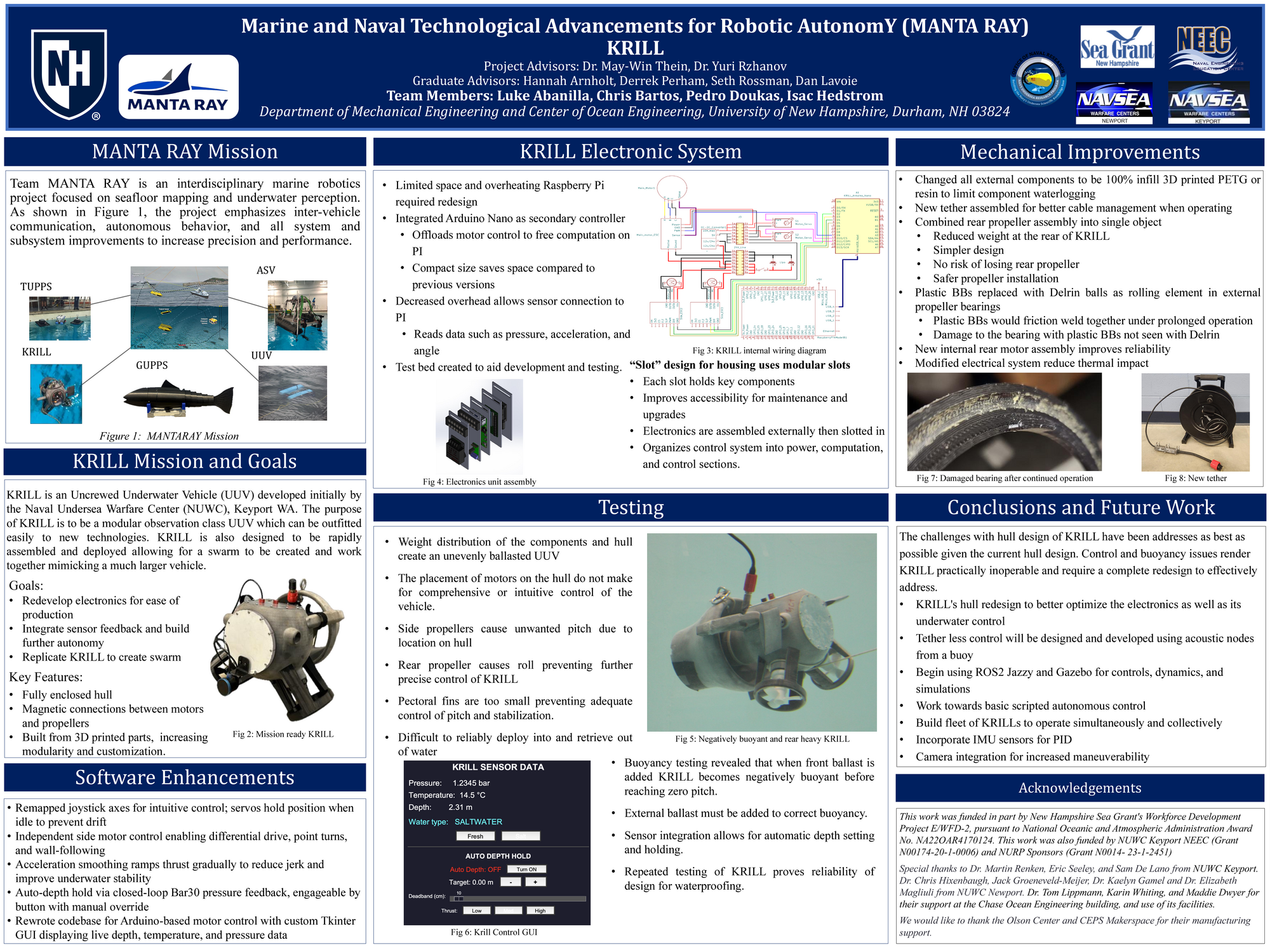
KRILL is a modular, observation-class Uncrewed Underwater Vehicle originally developed by the Naval Undersea Warfare Center (NUWC), Keyport, WA, and further advanced by Team MANTA RAY at the University of New Hampshire. KRILL is built for rapid deployment as part of a coordinated swarm, mimicking the capabilities of a larger vehicle through inter-vehicle communication and autonomous behavior. This year's efforts focused on three areas: mechanical improvements, electronics redesign, and software enhancements. Externally, all components were converted to 100% infill 3D-printed PETG or resin, and Delrin balls replaced plastic BBs in propeller bearings to prevent friction welding. An Arduino Nano was integrated as a secondary controller to offload motor control from the Raspberry Pi, reducing overheating and freeing resources for sensor integration. A modular "slot" housing design improved internal organization and accessibility. Software upgrades included remapped joystick controls, independent side motor differential drive, acceleration smoothing, and auto-depth hold via closed-loop pressure feedback. Hull geometry and motor placement continue to present buoyancy and control challenges, requiring a full redesign. Future work will target tether less acoustic control, ROS2-based autonomy, IMU-integrated PID, and fleet deployment.
Authors
| First Name |
Last Name |
|
Isac
|
Hedstrom
|
|
Pedro
|
Doukas
|
|
Christopher
|
Bartos
|
|
Luke
|
Abanilla
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Ocean Engineering (ISE)
Group Ocean Engineering
Added April 20, 2026, 8:56 p.m.
Updated April 20, 2026, 8:57 p.m.
See More Department Presentations Here