Title:
Operational Robot for Autonomy and Control
Poster
Preview Converted Images may contain errors
Abstract
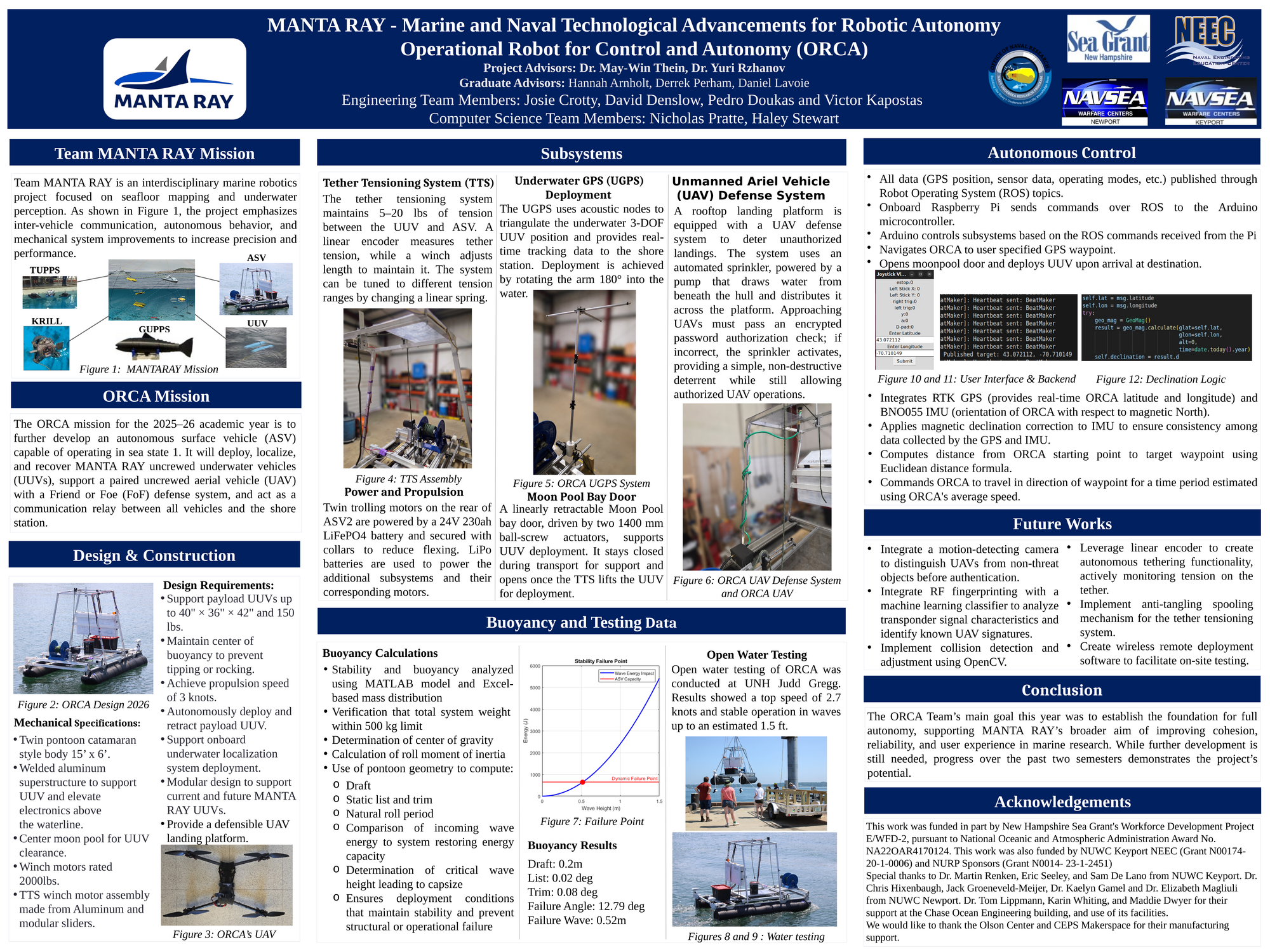
The goal of ORCA is to autonomously launch from Judd Gregg pier and deploy the Blue Robotics ROV on a ~10-minute observational mission. To accomplish this, the following are necessary: GPS waypoint navigation, a tether tensioning system (TTS) able to control the amount of tether out at a given time, and a stable UGPS to triangulate ROV position in relation to a UUV (Uncrewed Underwater Vehicle) stand-in it has deployed. In addition to this, have ORCA autonomously communicate with friendly UAVs (Uncrewed Aerial Vehicle) and detect friend-vs-foe.
Authors
| First Name |
Last Name |
|
Victor
|
Kapostas
|
|
Josephine
|
Crotty
|
Advisors:
| Full Name |
|
Dr. May-Win Thein
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Ocean Engineering (ISE)
Group Ocean Engineering
Added April 20, 2026, 5:20 p.m.
Updated April 20, 2026, 5:21 p.m.
See More Department Presentations Here