Title:
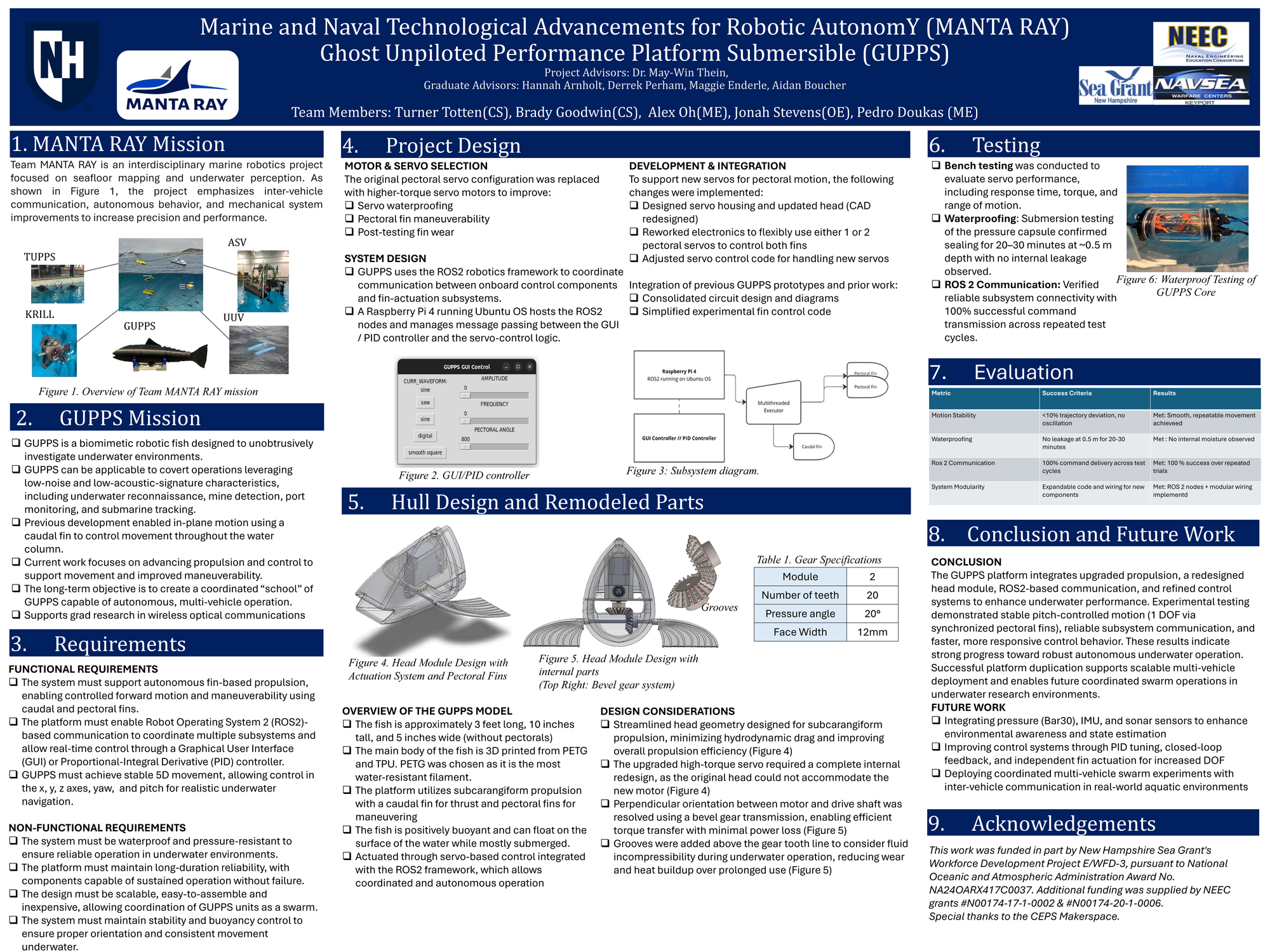
Marine and Naval Technological Advancements for Robotic AutonomY (MANTA RAY) Ghost Unpiloted Performance Platform Submersible (GUPPS)
Poster
Preview Converted Images may contain errors
Abstract
The Ghost Unpiloted Performance Platform Submersible (GUPPS) is a biomimetic robotic fish designed for underwater research, environmental monitoring, and multi-vehicle coordination. This work refined the GUPPS through mechanical redesign and control system enhancements to improve propulsion performance, reliability, and scalability. Specific upgrades included high-torque servo integration for increased fin authority, structural redesign for improved buoyancy distribution and stability, and Robot Operating System 2 (ROS2)-based subsystem coordination to enable modular communication and control. Experimental testing demonstrated faster and more precise angular response compared to prior iterations, smoother and more consistent fin motion, and stable maneuverability across five degrees of freedom (5-DOF). The current system supports autonomous operations and establishes a foundation for coordinated swarm deployment in real-world aquatic environments. Future development focuses on sensor integration, closed-loop feedback control, and robust multi-robot communication to enable fully autonomous, co-operative missions.
Authors
| First Name |
Last Name |
|
Jonah
|
Stevens
|
|
Alex
|
Oh
|
|
Turner
|
Totten
|
|
Brady
|
Goodwin
|
Advisors:
| Full Name |
|
Dr. May-Win Thein
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Ocean Engineering (ISE)
Group ECE/ME
Added April 20, 2026, 2:25 p.m.
Updated April 20, 2026, 2:25 p.m.
See More Department Presentations Here