Title:
VTOL-X
Poster
Preview Converted Images may contain errors
Abstract
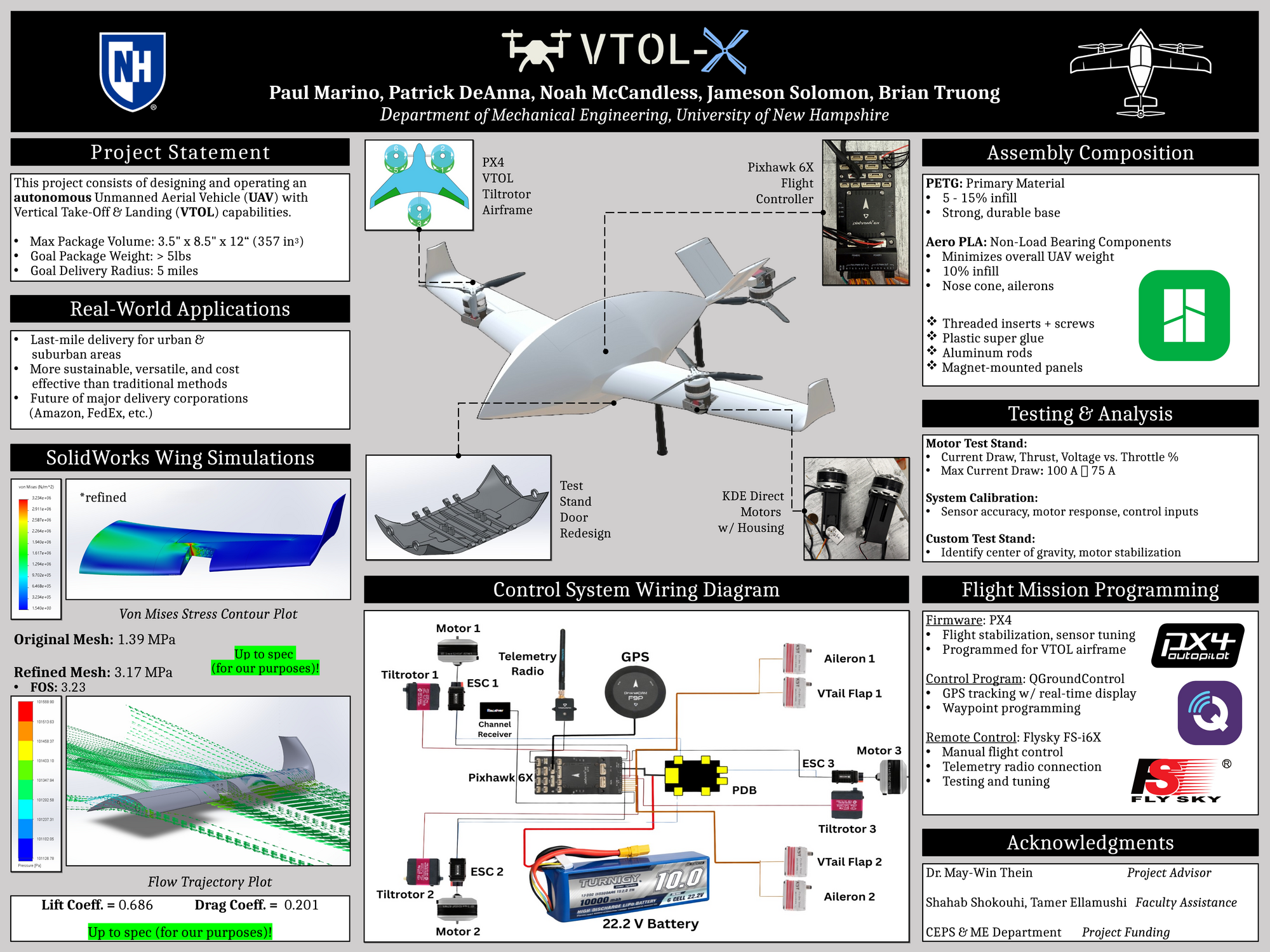
This project focuses on the design, development, and testing of a vertical takeoff and landing (VTOL) small unmanned aerial vehicle (sUAV) for last-mile package delivery. The system is designed to transport a 5 lb payload directly from a warehouse to a consumer within a 5-mile radius, addressing inefficiencies in traditional ground-based delivery such as traffic, cost, and delays. The airframe utilizes a tiltrotor configuration, combining multirotor hover capability with the potential for efficient forward flight. Structural components were manufactured using PETG and Aero PLA to balance strength and weight, while modular assembly methods support ease of maintenance and iteration. The control system is based on a Pixhawk flight controller running PX4 firmware, configured through QGroundControl. A custom test stand was used to validate motors, servos, and control responses prior to flight. The result is a scalable UAV platform capable of autonomous mission execution, with future work focused on improving efficiency, transition dynamics, and reliability.
Authors
| First Name |
Last Name |
|
Noah
|
McCandless
|
|
Brian
|
Truong
|
|
Jameson
|
Solomon
|
|
Paul
|
Marino
|
|
Patrick
|
DeAnna
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Mechanical Engineering (ISE)
Group Mechanical Engineering- Faculty Sponsored
Added April 20, 2026, 10:58 a.m.
Updated April 20, 2026, 10:59 a.m.
See More Department Presentations Here