Title:
Air Sea Flux LiDAR Buoy
Poster
Preview Converted Images may contain errors
Abstract
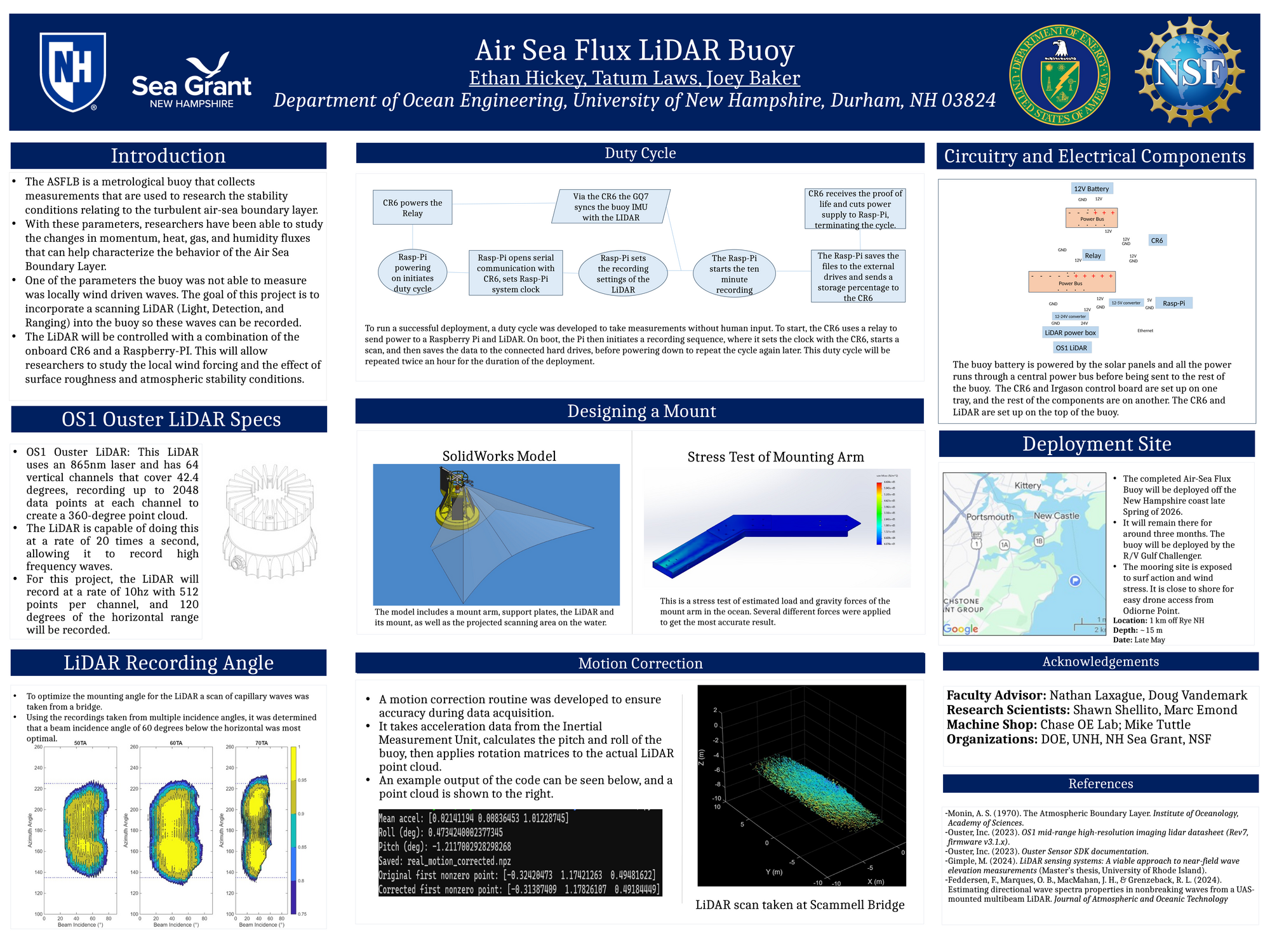
The Air Sea Flux LiDAR Buoy is a one-of-a-kind system that measures the small waves that other systems can’t. It then can correlate this information with the other metrics the buoy measures, such as the momentum, heat, gas, and humidity fluxes. This allows researchers to study atmospheric stability using the Obukhov wavelength. These stability parameters can allow modelers to develop optimized offshore wind farms. To install the LiDAR onto the buoy, it was necessary to find the optimal incidence angle and location for the LiDAR so that the best returns could be recorded. Based on recordings of capillary waves at the Scammell Bridge in Dover, the angle that collected the largest area of full returns was 60 degrees below the horizontal. The LiDAR also needed to be positioned so that it wasn’t scanning the buoy itself and didn’t interfere with the wind profile measurements. A mounting arm was designed with these criteria in mind and then constructed and installed onto the top of the buoy. The LiDAR scanner and its supporting electronics needed to be installed into the well of the buoy and integrated into preexisting systems. To be able to compare the LiDAR recordings with other instruments on the buoy, the recordings needed to be put through motion correction. The motion correction script interprets the given file, and outputs LiDAR range data and accelerations (from the Inertial Measurement Unit). This IMU data is used to calculate pitch and roll for each scan. Rotation matrices are then applied back to the point cloud to stabilize and correct the final product. Another important aspect of this project was creating a duty cycle, which involves cycling the LiDAR on and off at intervals to record at different points. This is done for a few reasons, to reduce the overall data collected while still getting a wide variety of times recorded and prevent the LiDAR from overheating. This also allowed for a sign of life signal to be sent back so that it can be seen remotely if the LiDAR is still recording data successfully. The end goal of this project is to have the LiDAR incorporated and the buoy deployed by the end of May. The buoy will be deployed a Kilometer off of Odiorne point for six months, providing a large quantity of atmospheric boundary layer data.
Authors
| First Name |
Last Name |
|
Tatum
|
Laws
|
|
Ethan
|
Hickey
|
|
Joey
|
Baker
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Ocean Engineering (ISE)
Group Ocean Engineering
Added April 19, 2026, 10:44 p.m.
Updated April 19, 2026, 10:45 p.m.
See More Department Presentations Here