Title:
Quad-X Swarm VTOL
Poster
Preview Converted Images may contain errors
Abstract
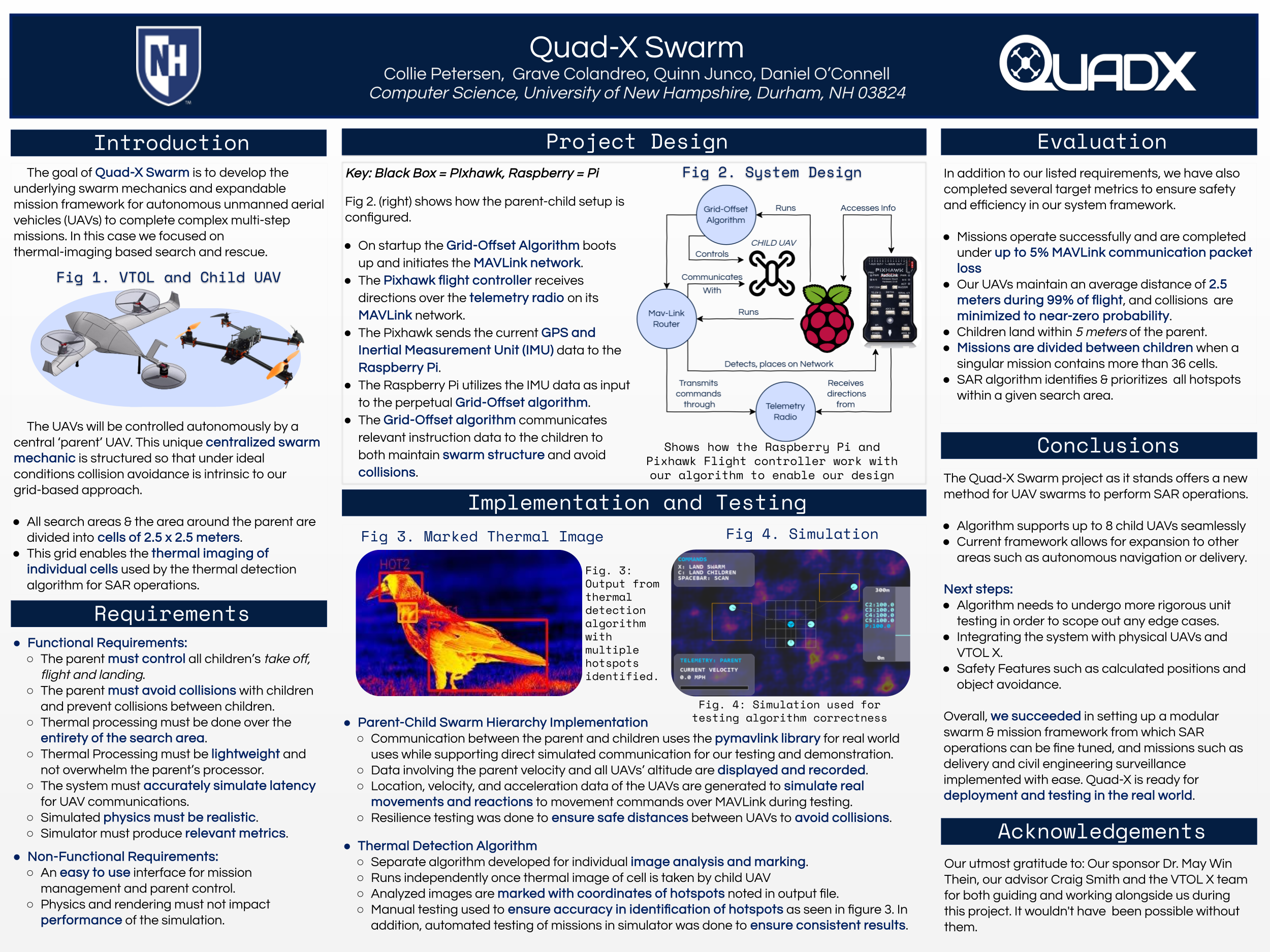
Quad X is an interdisciplinary project, advised by Dr. May Win Thein, dedicated to developing an expandable mission framework for synchronous swarms of UAVs. The project addresses the critical need for efficient disaster relief and Search and Rescue (SAR) operations by leveraging a unique centralized swarm architecture. Under this framework, an autonomous "parent" UAV serves as the central command and logistics hub, managing the distribution of supplies while simultaneously directing a fleet of "child" quads. These smaller units are equipped with thermal sensors to conduct wide-area search efforts. A core innovation of Quad X is its grid-based control system, which ensures that collision avoidance is intrinsic to the flight path under ideal conditions. Furthermore, this grid structure optimizes data processing by partitioning the search environment into discrete cells, allowing thermal data to be seamlessly translated into high-fidelity images for automated hot-spot detection. By integrating complex task delegation with a robust, scalable control mechanic, Quad X provides a foundation for autonomous systems to execute multi-step missions in high-stakes environments.
Authors
| First Name |
Last Name |
|
Daniel
|
O'Connell
|
|
Collie
|
Petersen
|
|
Quinn
|
Junco
|
|
Alyssa Grave
|
Colandreo
|
Advisors:
| Full Name |
|
Dr. May-Win Thein
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Computer Science (ISE)
Group Computer Science- Systems / Infrastructure
Added April 16, 2026, 6:06 p.m.
Updated April 17, 2026, 8:01 p.m.
See More Department Presentations Here