Title:
Nasa Lunabotics - Atlas 2 - Autonomy and Teleoperation
Poster
Preview Converted Images may contain errors
Abstract
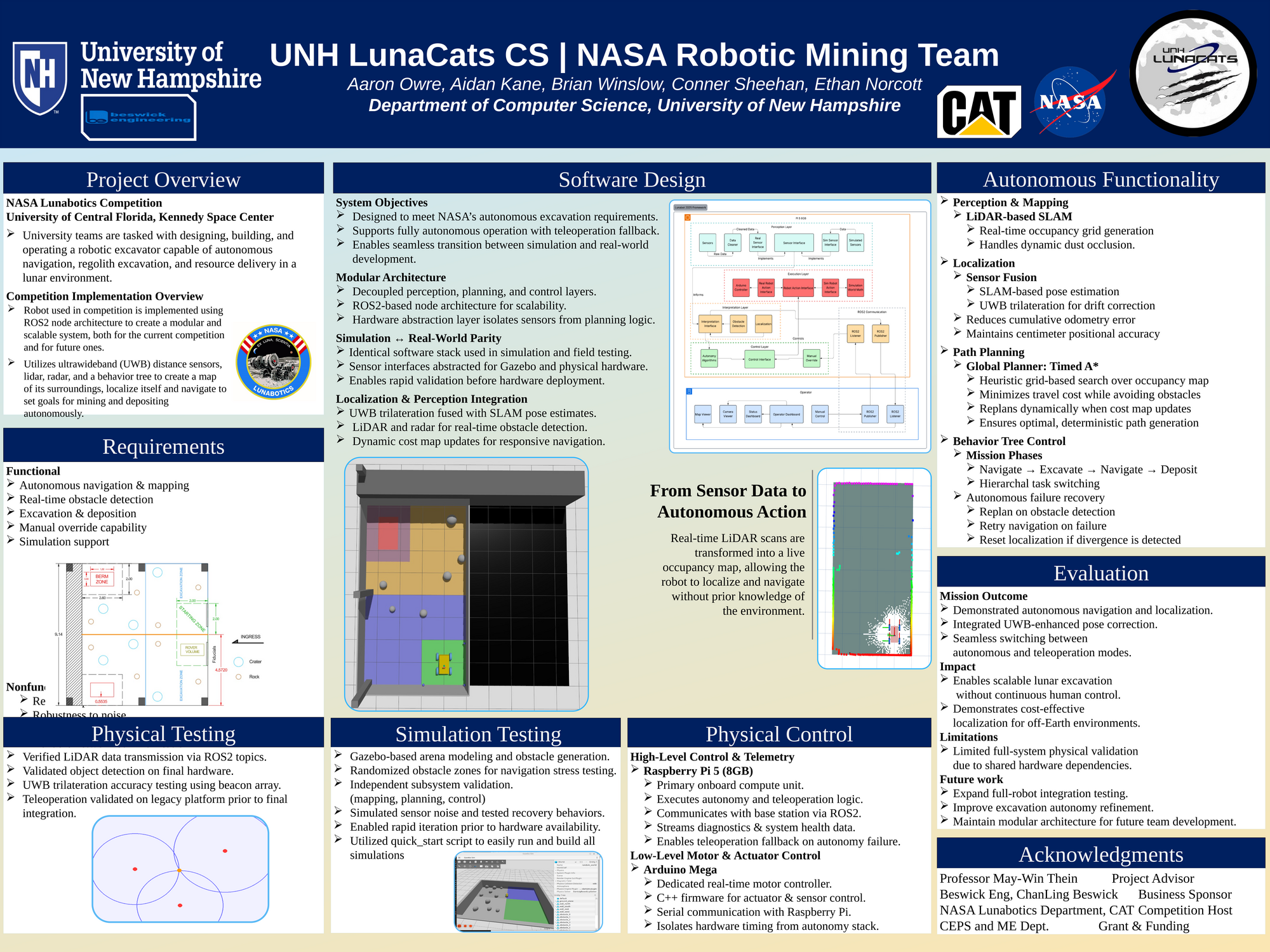
The Lunabotics Computer Science project is an interdisciplinary effort to develop a fully autonomous robot capable of completing a task defined by the NASA Lunabotics department with their goal being utilizing the design in the Artemis missions to the moon and mars. The computer science team integrates hardware systems designed by the electrical and mechanical engineering teams to achieve complete autonomy.
Our system combines LiDAR, ultra-wideband (UWB), and radar data to construct a real-time model of the robot’s surroundings. This environmental awareness enables the robot to navigate the arena, avoid obstacles, and operate without teleoperation. Obstacle detection data from LiDAR is processed through a behavior tree architecture, allowing the robot to make intelligent navigation decisions in real time.
Localization is achieved using UWB distance sensors, which continuously measure distances between fixed beacons and the robot. These measurements are used to triangulate the robot’s position with high accuracy. By integrating robust localization with reliable object detection, the robot can autonomously navigate the arena, excavate lunar regolith, and construct a berm at a designated location as requested by the challenge.
Authors
| First Name |
Last Name |
|
Brian
|
Winslow
|
|
Ethan
|
Northcott
|
|
Conner
|
Sheehan
|
|
Aaron
|
Owre
|
|
Aidan
|
Kane
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Computer Science (ISE)
Group Computer Science- Systems / Infrastructure
Added April 15, 2026, 4:19 p.m.
Updated April 15, 2026, 4:20 p.m.
See More Department Presentations Here