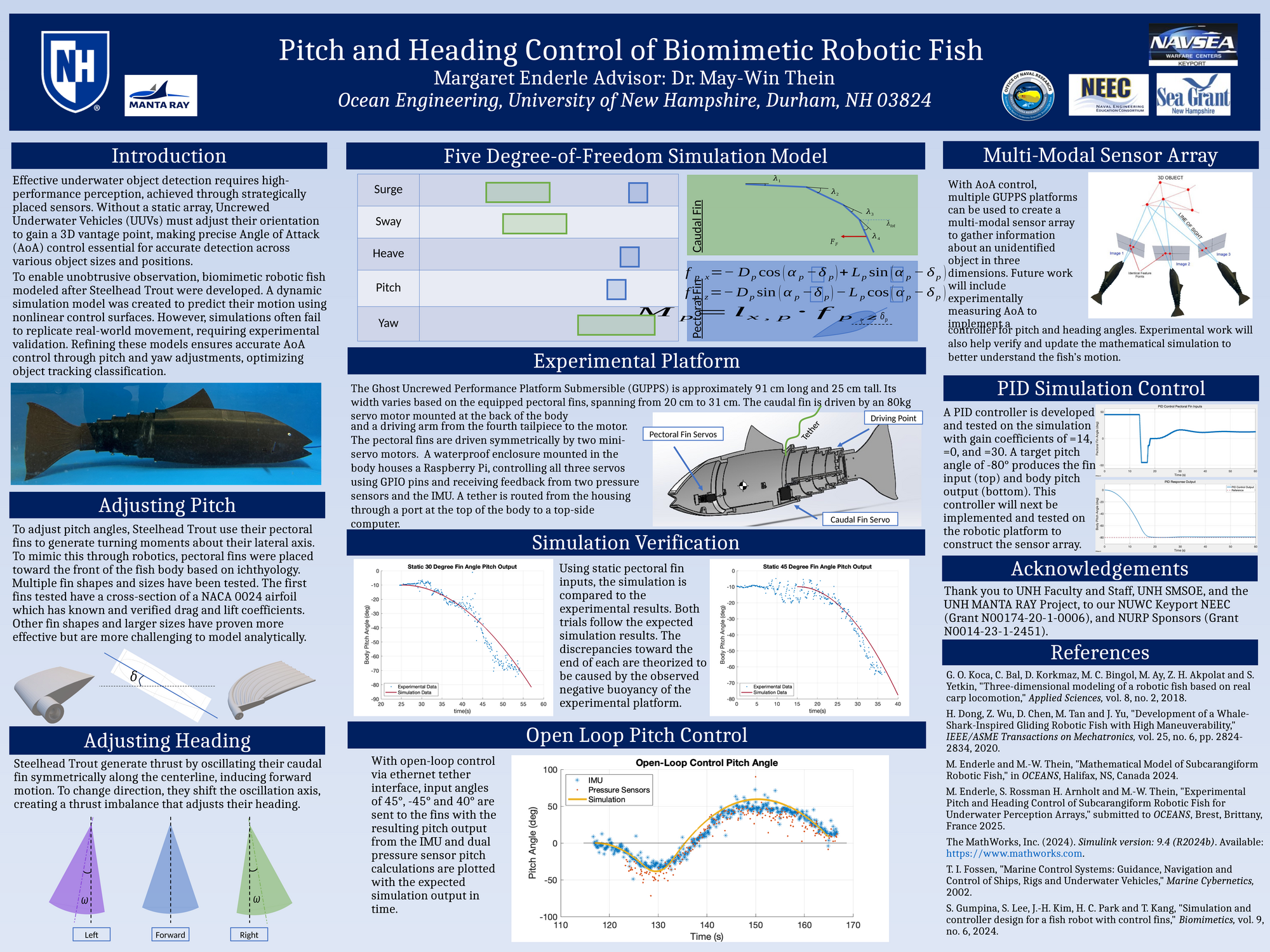
Achieving effective underwater object detection and classification requires strategically placed, high-performance sensors. To expand beyond the limitations of a static array, biomimetic Uncrewed Underwater Vehicles (UUVs) can unobtrusively orient position and orientation to obtain a 3D vantage point. Precise Angle of Attack (AoA) control is essential on these vehicles for accurate detection and classification of objects varying in size and position. A dynamic numerical model was created to estimate orientation angles in pitch and yaw, making up the vehicle's AoA. This simulation was verified experimentally, and control techniques are beginning to be implemented on the experimental platform and in the simulation environment.
Authors
First Name
Last Name
Margaret
Enderle
File Count: 3
Leave a comment
Submission Details
Conference GRC
Event Graduate Research Conference
Department School of Marine Science and Ocean Engineering (GRC)