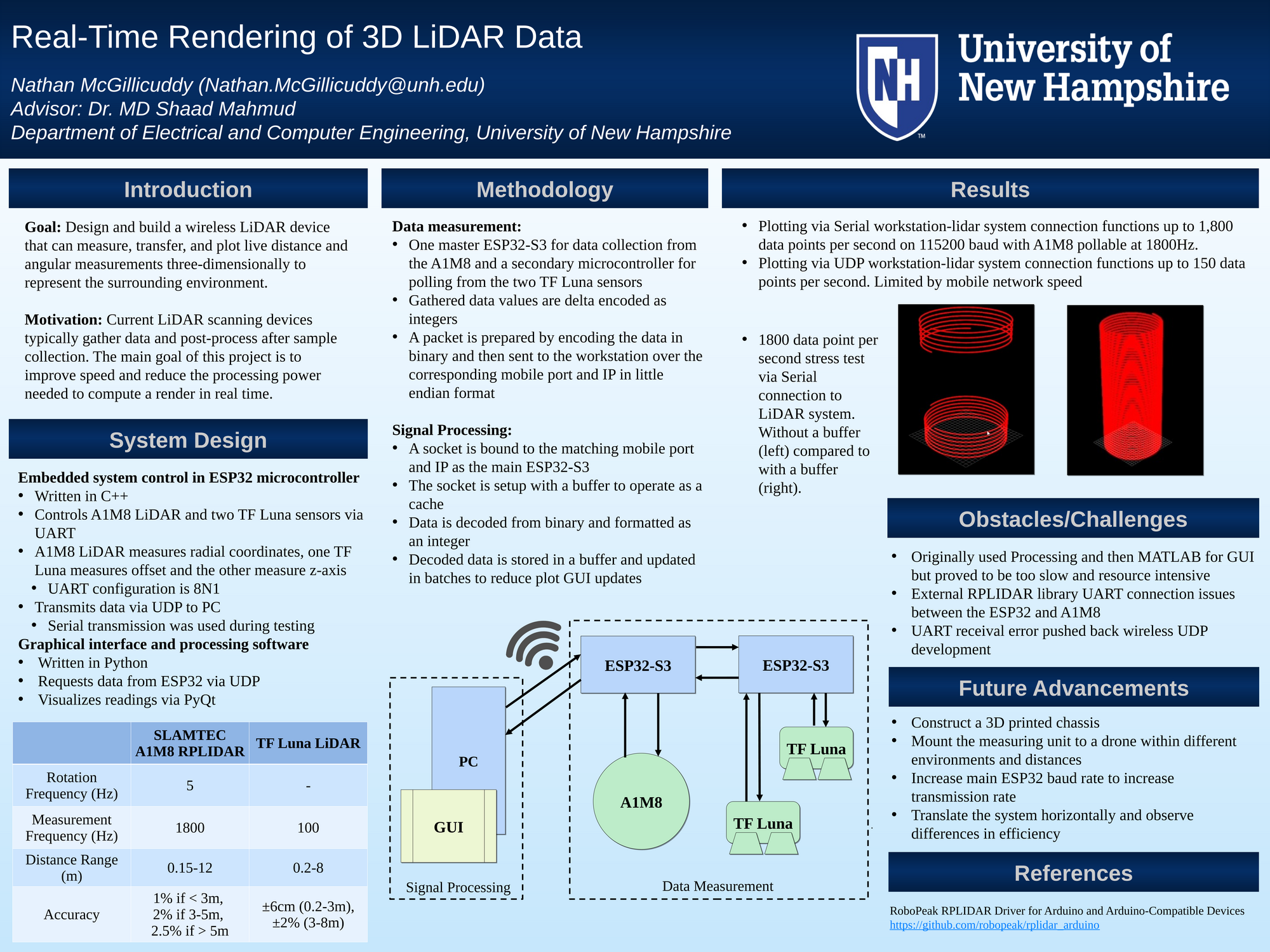
Light detection and ranging is commonly used for surveying and exploring new locations. It is achieved by emitting laser pulses and measuring the time it takes for them to return, so an exact distance can be known. Each point can be used to form a cloud and thus represent an environment. Current commercial and military grade systems cost thousands of dollars yet create a render after all the data has been gathered. This project presents the exploration and design of a real-time rendering 360 degree capable LiDAR measurement system. The designed system encompasses one two-dimensional 360 degree rotating LiDAR device (A1M8 RPLIDAR) combined with two single-point detection LiDAR devices (TF Luna) used to render a three-dimensional environment. The single-point LiDAR's enable the measurement unit to move along two axis from its original location allowing a fuller encompass of the environment. During the course of the project, it was found ultimately the low power devices could handle the data transmission rates within reason, showing feasibility. But, higher sampling rates caused buffering and reduction of GUI updates. Although the challenge was encountered, the outcome of this study shows the possibility for further development of real-time render system given more power and faster processing.
Authors
First Name
Last Name
Nathan
McGillicuddy
File Count: 2
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Electrical and Computer Engineering (ISE)