Title:
UNH Lunacats - NASA Robotic Mining
Poster
Preview Converted Images may contain errors
Abstract
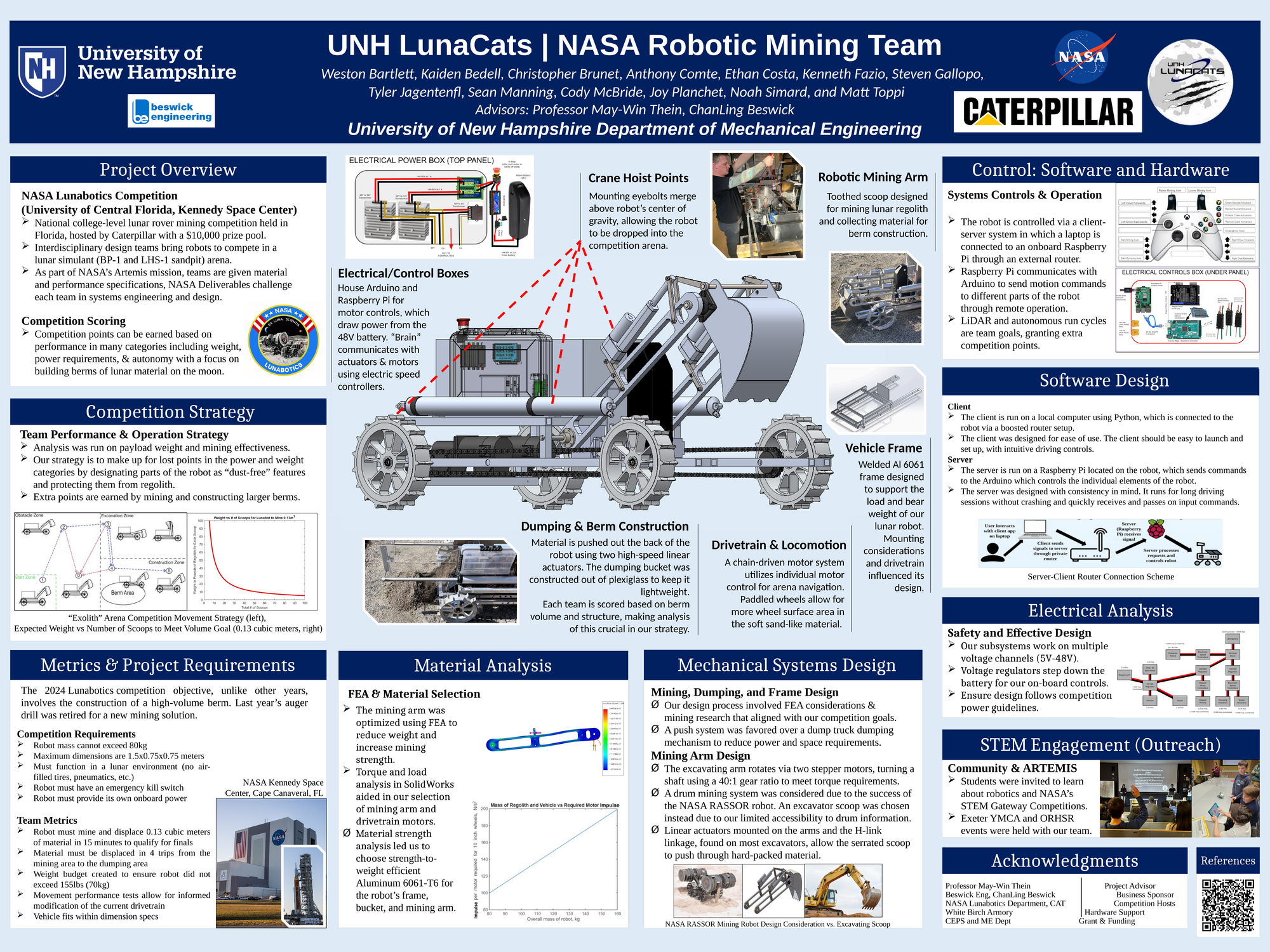
The UNH LunaCats Robotics Team is a multidisciplinary student organization that competes annually in the NASA LunaBotics Competition. Each year NASA and Caterpillar host a national college-level robotic mining competition. This year's challenge focuses on the NASA ARTEMIS mission, which consists of constructing a lunar robot to mine and dump lunar soil simulant known as ‘regolith’ into a designated construction zone to build a foundational berm structure. NASA intends to build protective berms on a future permanent moon base. Points are scored based on the amount of regolith moved, with incentives on teams’ use of automation. Points are lost based on a robot’s power requirements and weight. Our team seeks to program an efficient and easy-to-use control system for the robot and implement automation for mining and dumping material. To maximize performance at competition, the team will focus on minimizing weight and maximizing robot output through specialized functional mechanical subsystems. A new robot design, featuring hardware such as motors, servos, and actuators, was designed and analyzed in CAD and machined in Kingsbury Hall and the Olsen manufacturing center. Limit switches and LiDAR sensors are used to actively control the robot’s autonomous motion through communication with the Arduino and motor controllers. Post-competition, our design is given to NASA to assist in their ARTEMIS mission’s lunar rover design. Next year’s team will build upon our design for competition in 2025.
Authors
| First Name |
Last Name |
|
Sean
|
Manning
|
|
Matt
|
Toppi
|
|
Noah
|
Simard
|
|
Kaiden
|
Bedell
|
|
Kenny
|
Fazio
|
|
Tyler
|
Jagentenfl
|
|
Anthony
|
Compte
|
|
Chris
|
Brunet
|
|
Joy
|
Planchet
|
|
Cody J.
|
McBride
|
|
Steven
|
Gallopo
|
|
Ethan
|
Costa
|
|
Weston
|
Bartlett
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Mechanical Engineering (ISE)
Group Competition & Clubs
Added April 16, 2024, 5:47 p.m.
Updated April 17, 2024, 11:18 a.m.
See More Department Presentations Here