Title:
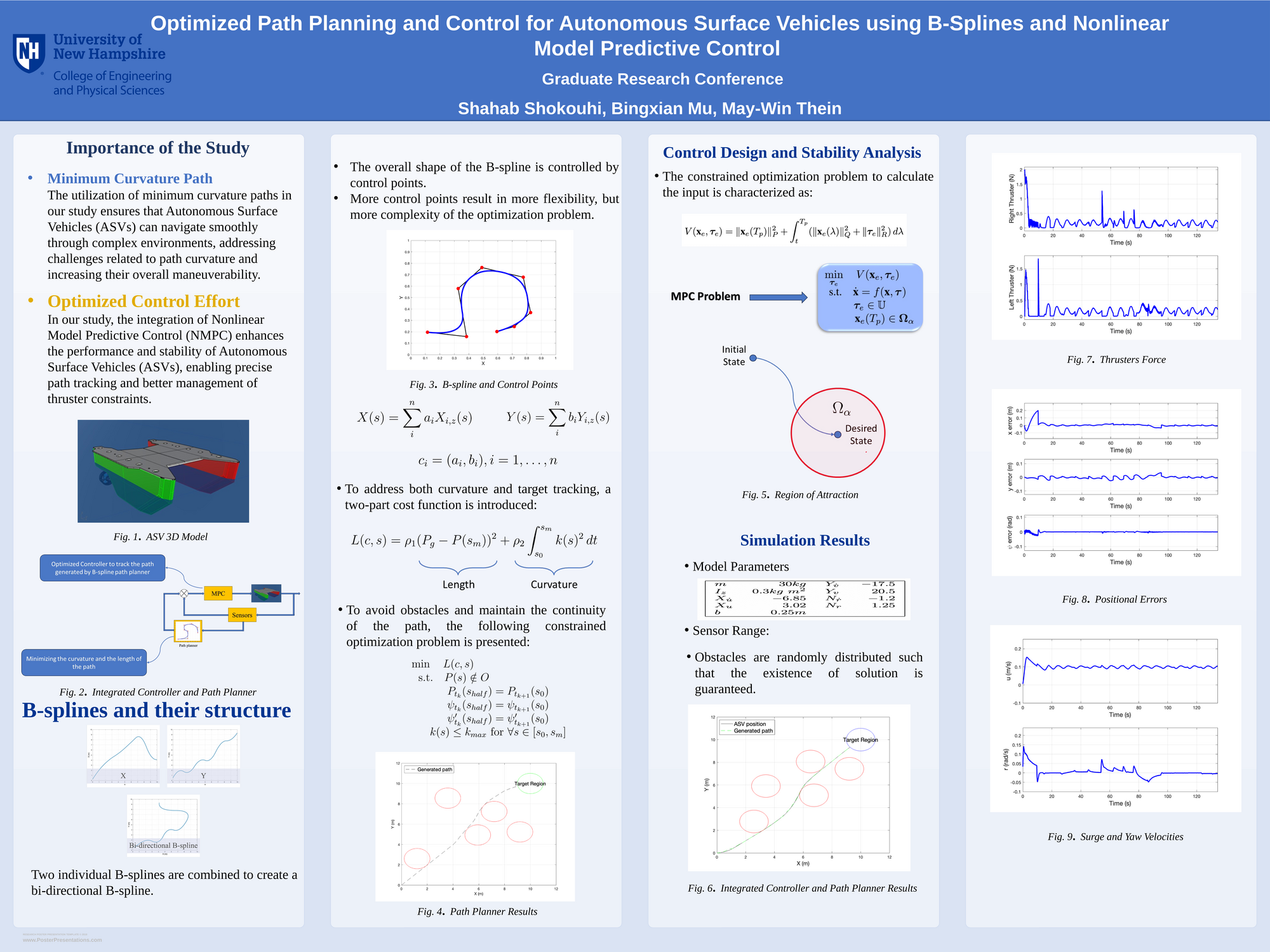
Optimized Path Planning and Control for Autonomous Surface Vehicles using B-Splines and Nonlinear Model Predictive Control
Poster
Preview Converted Images may contain errors
Abstract
In this paper, B-splines are used to solve the problem
of online path planning for Autonomous Surface Vehicles (ASVs).
The proposed approach is based on bi-directional B-spline curves
that takes into account path curvature and involves defining a cost
function that minimizes the overall curvature of the path, while
ensuring that the final point of the path at each time step is as
close as possible to the final goal. Path curvature is especially
critical for vehicles that lack high maneuverability, such as
some ASVs. The proposed method determines a temporary path
using B-spline curves and constrained optimization. The path
is updated at each time step based on range sensor data and
with constraints defined to avoid discontinuity in the first and
second derivatives of the path with respect to time and thus,
making the path feasible to track. To integrate the generated path
with the ASV, Nonlinear Model Predictive Control (NMPC) is
used to ensure path tracking. To evaluate the performance of the
proposed approach, simulation experiments are provided which
demonstrate the effectiveness and robustness of the integrated
path planning and control algorithm in generating feasible paths
and accurately controlling the ASV for successful trajectory
tracking
Authors
| First Name |
Last Name |
|
May-Win
|
Thein
|
|
Bingxian
|
Mu
|
|
Shahab
|
Shokouhi
|
Leave a comment
Submission Details
Conference GRC
Event Graduate Research Conference
Department Mechanical Engineering (GRC)
Group Poster Presentation
Added April 10, 2024, 10:57 p.m.
Updated April 10, 2024, 10:59 p.m.
See More Department Presentations Here