Title:
Robotic Blacksmithing in Space
Poster
Preview Converted Images may contain errors
Abstract
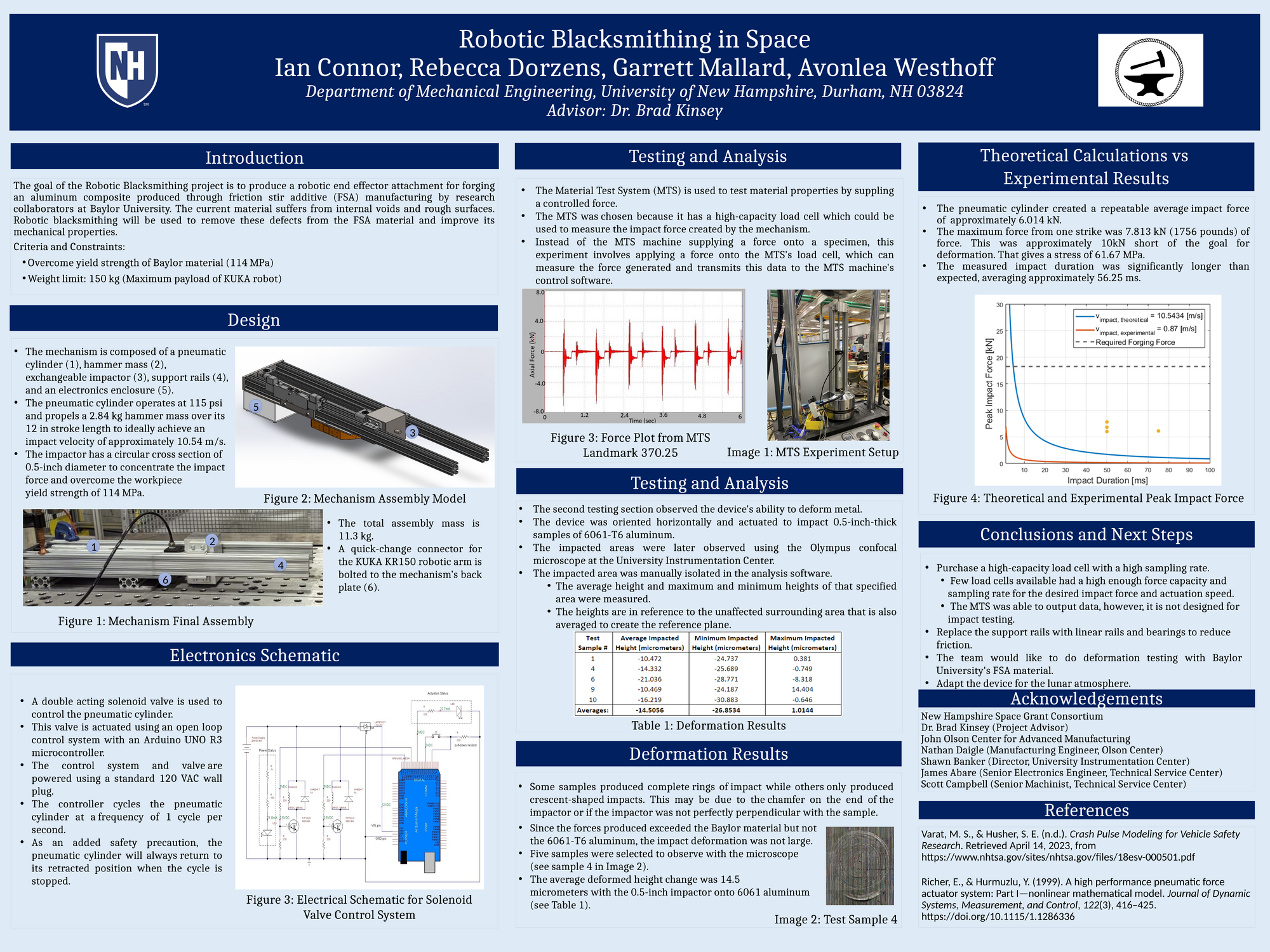
The goal of the project is to produce a robotic end effector attachment for forging an aluminum composite. The solution involves using a pneumatic cylinder to provide an impact force onto a material and act as an automated, post-processing blacksmith. The air cylinder can generate a predetermined force by supplying it with a certain pressure also by outfitting the cylinder with an aluminum mass which enables it to deliver a consistent and precise impact. Mounted onto a Kuka robot, the design will deliver a precise and consistent compression force in any orientation.
The impact force was determined using the MTS machine's load cell at the John Olson Manufacturing Center. The deformation of aluminum 6061 samples were measured using the Olympus confocal microscope at the University Instrumentation Center.
Authors
| First Name |
Last Name |
|
Avonlea
|
Westhoff
|
|
Garrett
|
Mallard
|
|
Rebecca
|
Dorzens
|
|
Ian
|
Connor
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Mechanical Engineering (ISE)
Group Research
Added April 17, 2023, 5:18 p.m.
Updated April 17, 2023, 5:19 p.m.
See More Department Presentations Here