Title:
LunaSwarm: NASA Robot Mining Competition
Poster
Preview Converted Images may contain errors
Abstract
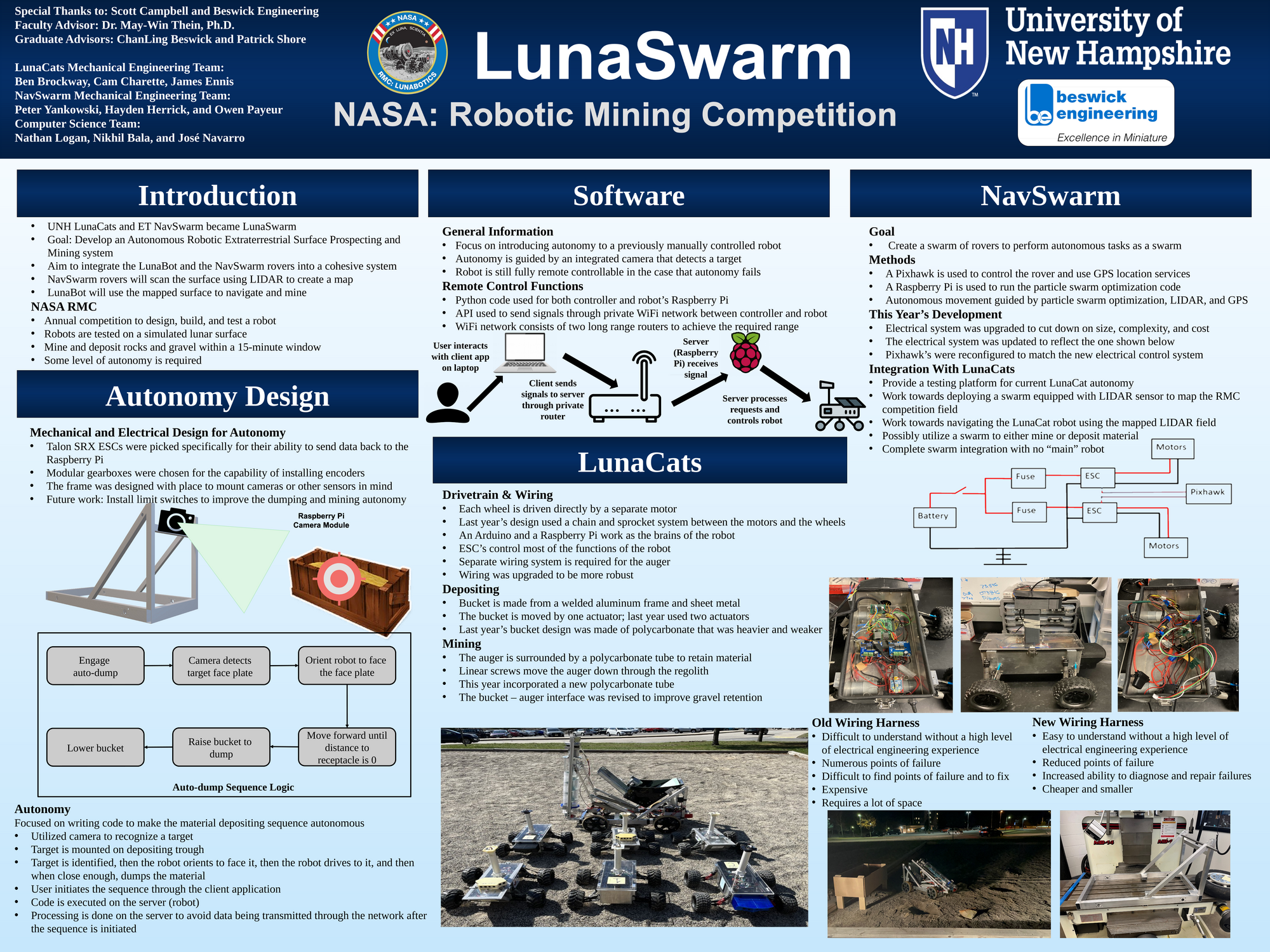
The NASA Robot Mining Competition focuses on the technology and development of the construction of a Lunar mining robot. Each team is judged on their robot's ability to mine, collect, and deposit gravel on a simulated lunar regolith surface. Points are awarded in categories such as mass, power consumption, material collected, and autonomy implemented. For 2023 the LunaCats and NavSwarm project teams have combined with the idea of building a Lunabotics robot that has a larger emphasis on autonomy with the smaller NavSwarm robots being used as an initial testing platform. This combination is also with respect to the future idea of having a swarm of robots being used as a scouting method for the main Lunabotics mining, collection, and depositing robot. The LunaSwarm team has been able to implement autonomy into the depositing subsystem. With other improved elements of the robot in mass reduction, drivetrain improvements, removal of excessive systems, and streamlining of collection and material transfer processes. The team will be competing in a competition at the University of Alabama starting on May 20th.
Authors
| First Name |
Last Name |
|
Jose
|
Navarro
|
|
Nikhil
|
Bala
|
|
Nathan
|
Logan
|
|
Owen
|
Payeur
|
|
Hayden
|
Herrick
|
|
Peter
|
Yankowski
|
|
James
|
Ennis
|
|
Cameron
|
Charette
|
|
Ben
|
Brockway
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Mechanical Engineering (ISE)
Group Competition & Clubs
Added April 17, 2023, 1:17 p.m.
Updated April 18, 2023, 1:58 p.m.
See More Department Presentations Here