Title:
Ghost Unpiloted Performance Platform Submersible
Poster
Preview Converted Images may contain errors
Abstract
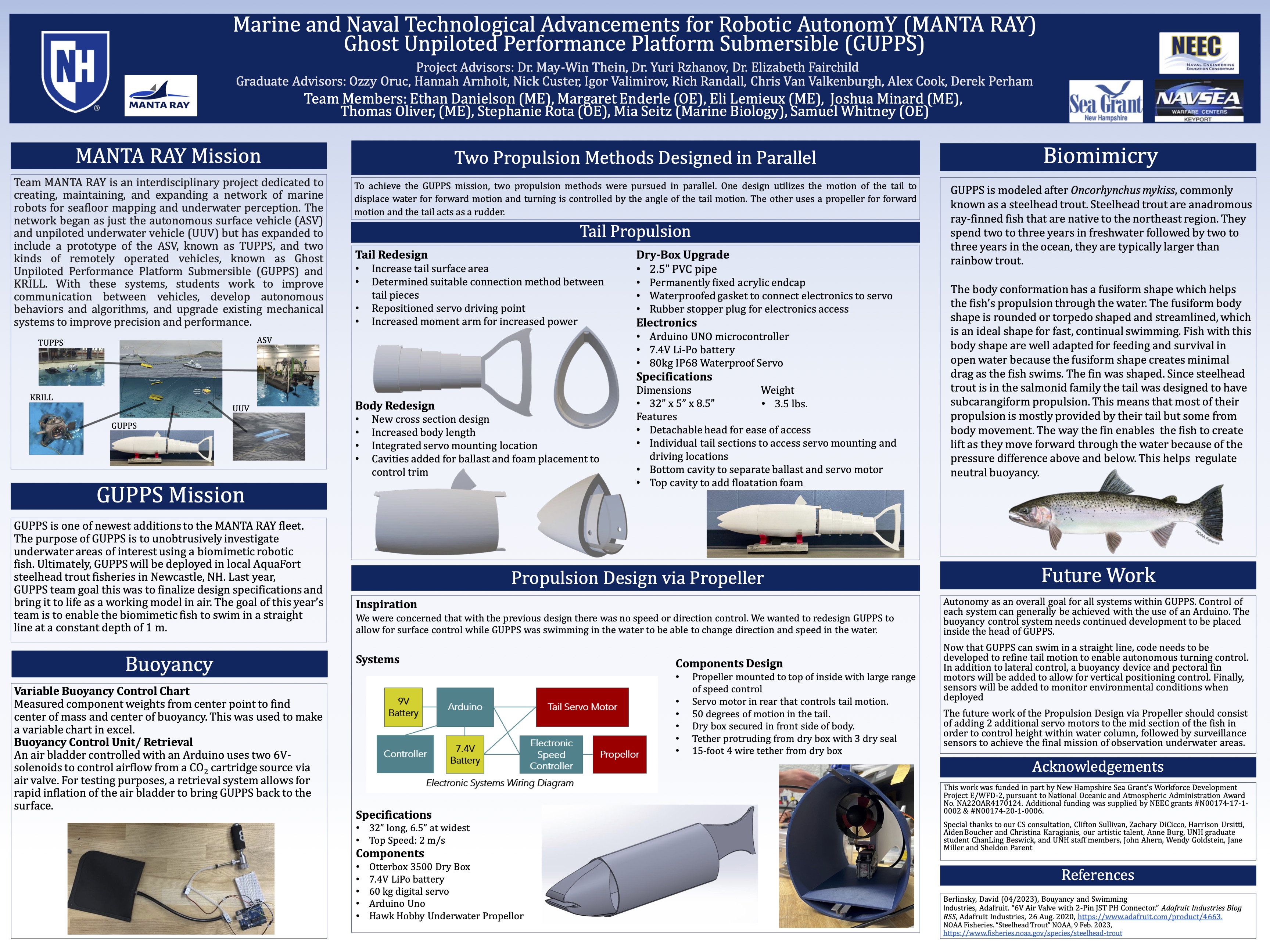
As a part of the Marine and Naval Technological Advancements for Robotic AutonomY (MANTA RAY), the Ghost Unpiloted Performance Platform Submersible (GUPPS), is one member of a fleet of autonomous marine robots. The goal of GUPPS is to create an unobtrusive method to survey the environment through a variety of sensors using camouflage and biomimicry. Previous work was completed to achieve biomimicry in appearance and movement of the fish’s body. This study developed on the previous year's design to create a robotic fish with the ability to propel itself through water. Working in parallel, two teams formed designs for propulsion, one using an internal propeller with a rudder, and the other imitating the natural motion of a fish’s tail. In conjunction with the lateral motion, a buoyancy control device is being developed to enable the control of vertical motion. This year’s work will enable further development of robotic autonomy of GUPPS to covertly monitor its surroundings and aid in the MANTA RAY mission.
Authors
| First Name |
Last Name |
|
Thomas
|
Oliver
|
|
Margaret
|
Enderle
|
|
Mia
|
Seitz
|
|
Joshua
|
Minard
|
|
Eli
|
Lemieux
|
|
Ethan
|
Danielson
|
|
Samuel
|
Whitney
|
|
Stephanie
|
Rota
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Ocean Engineering (ISE)
Added April 14, 2023, 6:16 p.m.
Updated April 18, 2023, 1:21 p.m.
See More Department Presentations Here