Title:
Project MANTA RAY: Unpiloted Underwater Vehicle
Poster
Preview Converted Images may contain errors
Abstract
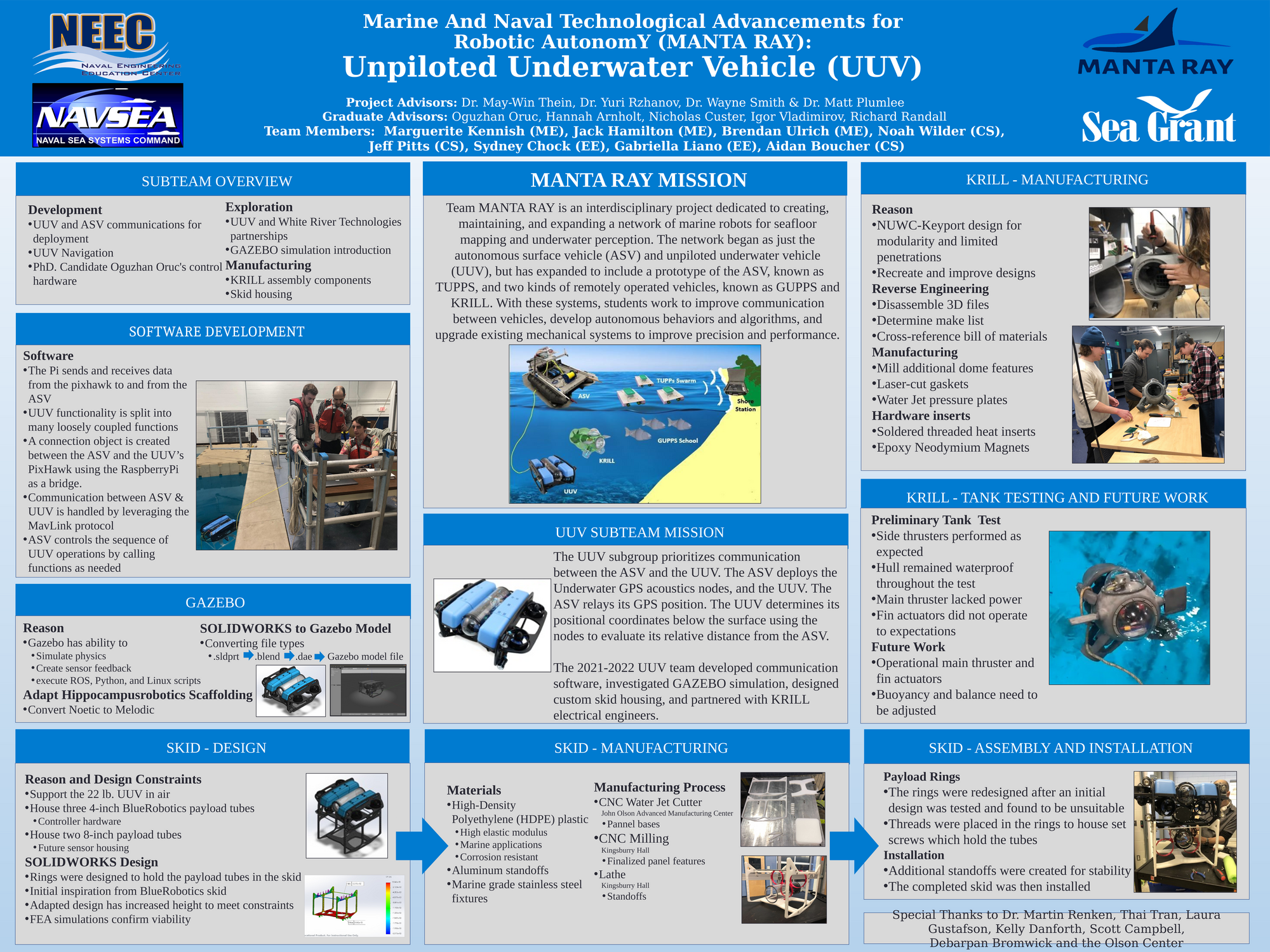
The Unpiloted Underwater Vehicle (UUV) is a subteam of the larger project MANTA RAY: Marine And Naval Technological Advancements for Robotic Autonomy. The project’s goal is to create a modular network of marine robots for missions such as seabed mapping or underwater surveying and inspection. Within this mission is an emphasis on the development of autonomous behavior and underwater perception and communication. The UUV is deployed by the Autonomous Surface Vehicle (ASV), another vehicle within MANTA RAY, to conduct underwater water investigation within an area of interest. The UUV subteam’s objectives this year were to design and manufacture a payload skid, a structure that could be attached to the UUV’s existing frame. The skid’s purpose is to carry housings for additional sensors and batteries, expanding the perceptive capabilities and endurance of the UUV. In addition to this, the subteam focused on establishing communication between the UUV and the ASV, as well as aiding in the construction of a new MANTA RAY vehicle known as KRILL.
Authors
| First Name |
Last Name |
|
Aidan
|
Boucher
|
|
Gabriella
|
Liano
|
|
Sydney
|
Chock
|
|
Jeff
|
Pitts
|
|
Noah
|
Wilder
|
|
Brendan
|
Ulrich
|
|
Jack
|
Hamilton
|
|
Marguerite
|
Kennish
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Ocean Engineering (ISE)
Added April 18, 2022, 9:57 p.m.
Updated April 18, 2022, 9:57 p.m.
See More Department Presentations Here