Title:
Quad-X Swarm
Poster
Preview Converted Images may contain errors
Abstract
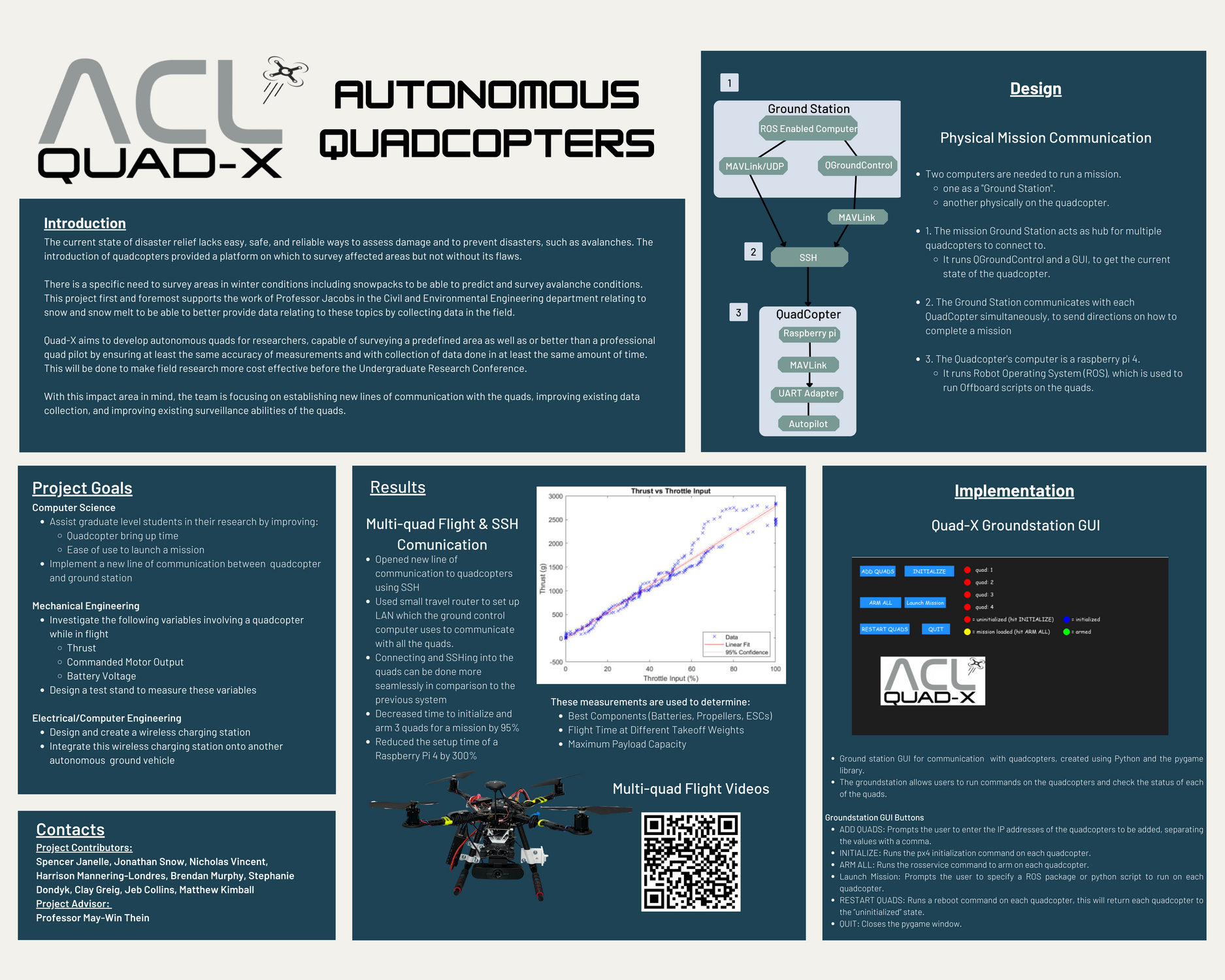
The current state of disaster relief lacks easy, safe, and reliable ways to assess damage and to prevent disasters, such as avalanches. The introduction of quadcopters has provided a platform on which to survey affected areas but not without its flaws. Historically, it has relied heavily on the expertise of a professional pilot especially when consumer quadcopters are deployed.
QuadX aims to provide an autonomous platform on which to map and survey areas. This allows graduate students to complete their work in the areas of avalanche and natural disaster research. With the assistance of these quadcopters, the researchers will be able to more reliably map areas in a more cost-effective manner. This quadcopter system utilizes scripting languages working in tandem with Robot Operating System (ROS) running on a microcomputer paired with a flight controller. QuadX Swarm has created a force stand to measure thrust, a wireless charging station, a WiFi arming system, and scripts to configure each quadcopter for flight as well as launching a mission.
Authors
| First Name |
Last Name |
|
Nick
|
Vincent
|
|
Jon
|
Snow
|
|
Brendan
|
Murphy
|
|
Harrison
|
Mannering-Londres
|
|
Matthew
|
Kimball
|
|
Spencer
|
Janelle
|
|
Clayton
|
Greig
|
|
Stephanie
|
Dondyk
|
|
Jeb
|
Collins
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Mechanical Engineering (ISE)
Group Competition and Club Teams
Added April 18, 2022, 9:56 a.m.
Updated April 18, 2022, 9:56 a.m.
See More Department Presentations Here