Title:
Marine and Naval Technological Advancements in Robotics and Autonomy (MANTA RAY)
Poster
Preview Converted Images may contain errors
Abstract
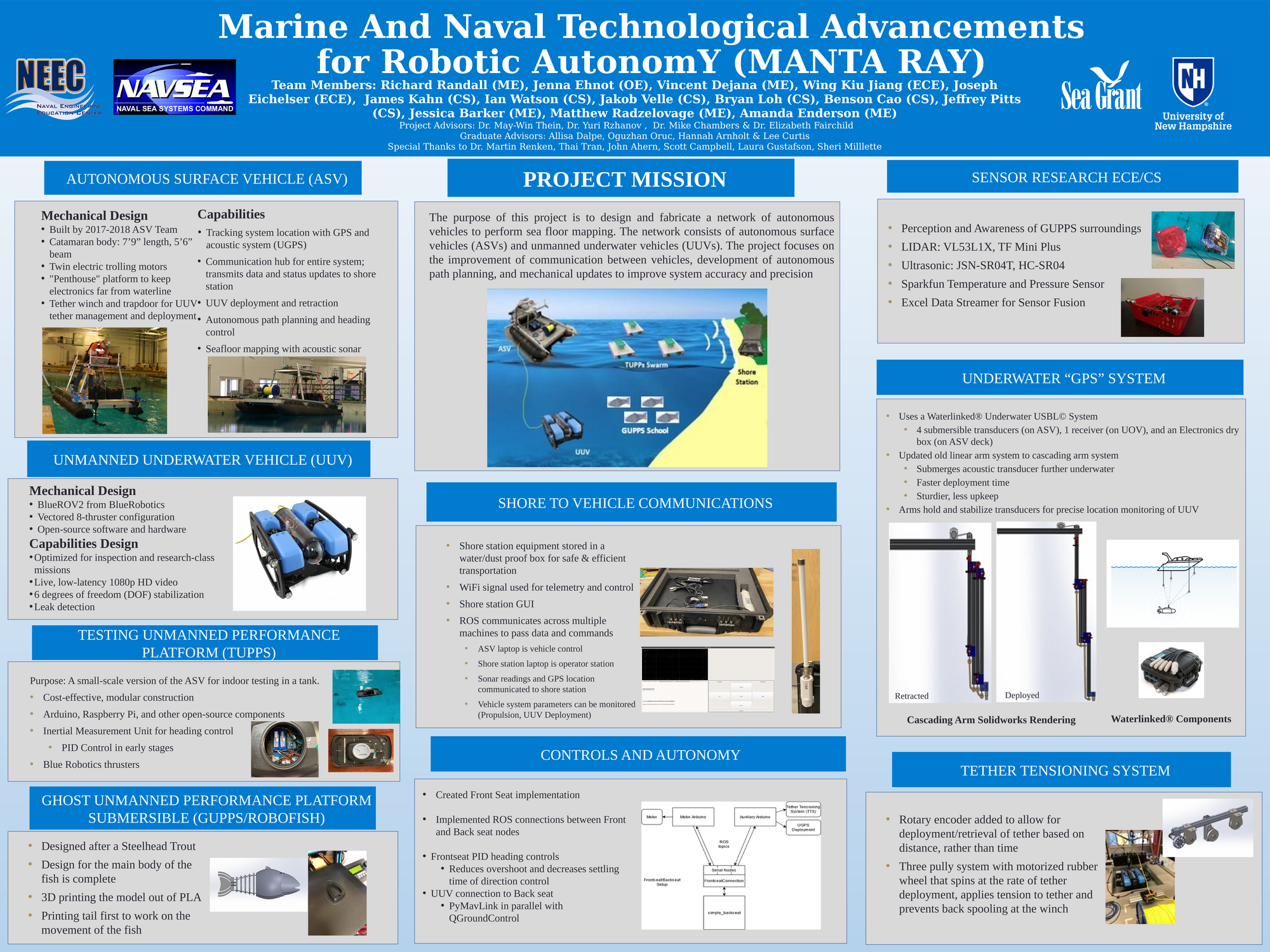
The Marine and Naval Technological Advancements for Robotic AutonomY (MANTA RAY) Team is an interdisciplinary engineering team tasked with designing and fabricating a network of autonomous systems to conduct an ocean mapping mission. The central autonomous surface vehicle (ASV) was designed to navigate open water to complete a seafloor mapping pattern, remotely deploy the BlueROV2 underwater unmanned vehicle (UUV), and act as a communication hub for all vehicles in the fleet. The UUV once deployed will carry out navigation and examination of a point of interest, while taking video footage, and then return to the ASV for retrieval. The team has created a graphic user interface to run on a laptop that receives all communications from the ASV, referred to as the shore station. From the shore station a user can track the status of all systems, view the camera footage of the UUV, and remote pilot the ASV if necessary. The project has been designed to be modular such that changes can easily be made to the platform to suit the needs of future teams. Currently, the team is constructing numerous small scale ASVs (TUPPS) and designing biomimetic fish (GUPPS) to integrate into the fleet, expanding the capabilities and scope of the autonomous network.
Authors
| First Name |
Last Name |
|
Amanda
|
Enderson
|
|
Matthew
|
Radzelovage
|
|
Jessica
|
Barker
|
|
Jeffery
|
Pitts
|
|
Benson
|
Cao
|
|
Bryan
|
Loh
|
|
Jakob
|
Velle
|
|
Ian
|
Watson
|
|
James
|
Khan
|
|
Joseph
|
Eichelser
|
|
Wing Kiu
|
Jiang
|
|
Jenna
|
Ehnot
|
|
Richard
|
Randall
|
|
Vincent
|
Dejana
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Mechanical Engineering (ISE)
Group Competition and Club Teams
Added April 25, 2021, 11:14 p.m.
Updated April 26, 2021, 2:38 p.m.
See More Department Presentations Here