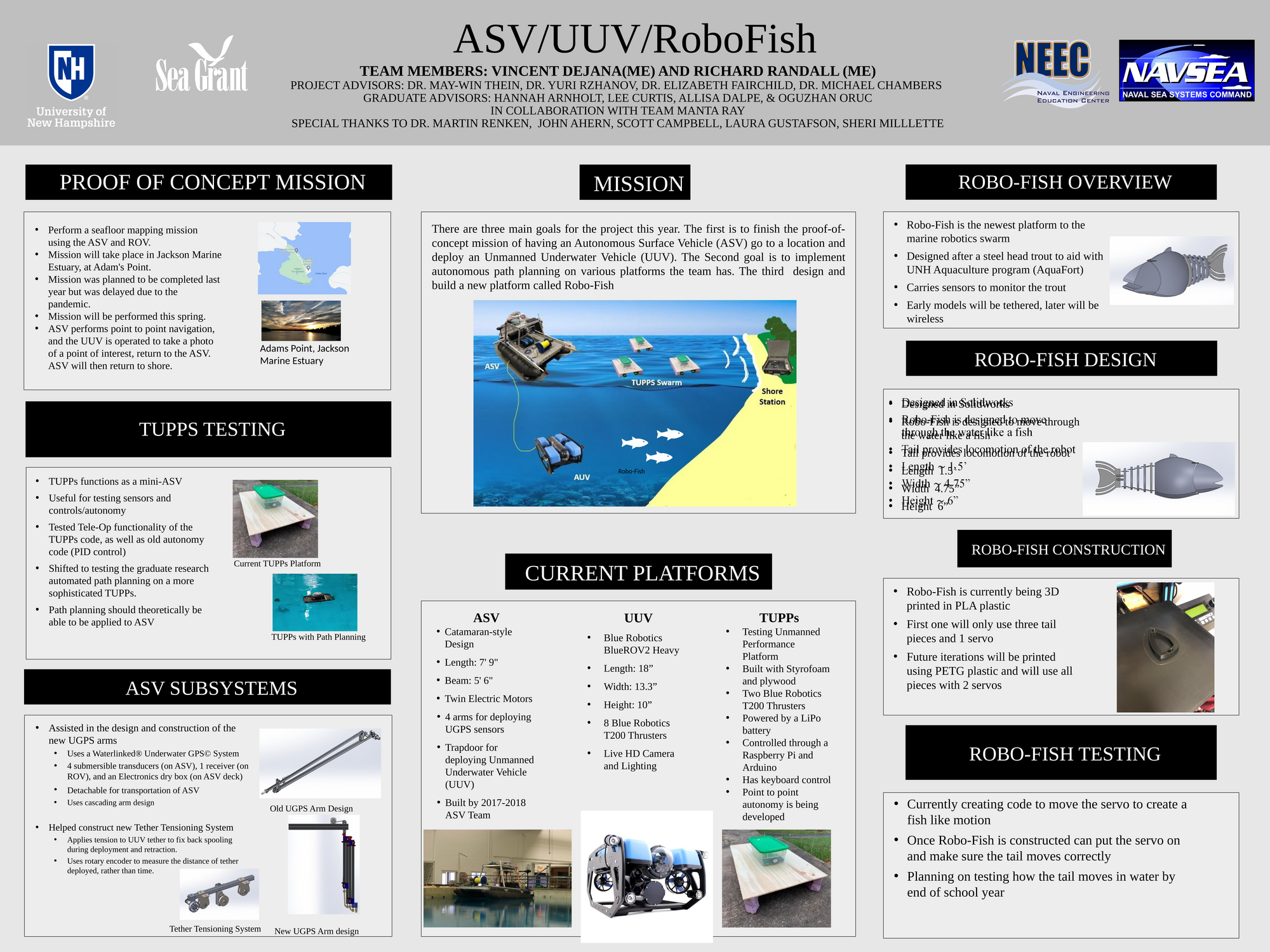
ASV/UUV/RoboFish is a continuation of past years’ ASV and ROV teams and builds upon the platforms created by those teams: The Autonomous Surface Vehicle (ASV), the Unmanned Underwater Vehicle (UUV), and the Testing Unmanned Performance Platform (TUPPs). The team assisted in the construction and redesign of multiple ASV subsystems: an underwater acoustic sensor deployment system, known as the UGPS Arms, and a Tether Tensioning System. These subsystems were improved to better suit the needs of the fleet during a Proof-of-Concept mission to be performed this spring at Adam’s Point in Jackson Marine Estuary. Graduate research automated path planning algorithms were tested on TUPPs, which in the future can be implemented on the ASV as well as other unmanned surface vehicles. RoboFish, the newest platform to the fleet, is a biomimetic fish designed to look like the Steel Head Trout and will be used to study these fish in the future during its own Proof-of-Concept mission in the UNH Open Ocean Aquaculture program. The team designed CAD models of RoboFish, which is in its first stages of construction and testing.
Authors
First Name
Last Name
Vincent
Dejana
Richard
Randall
File Count: 2
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)