Title:
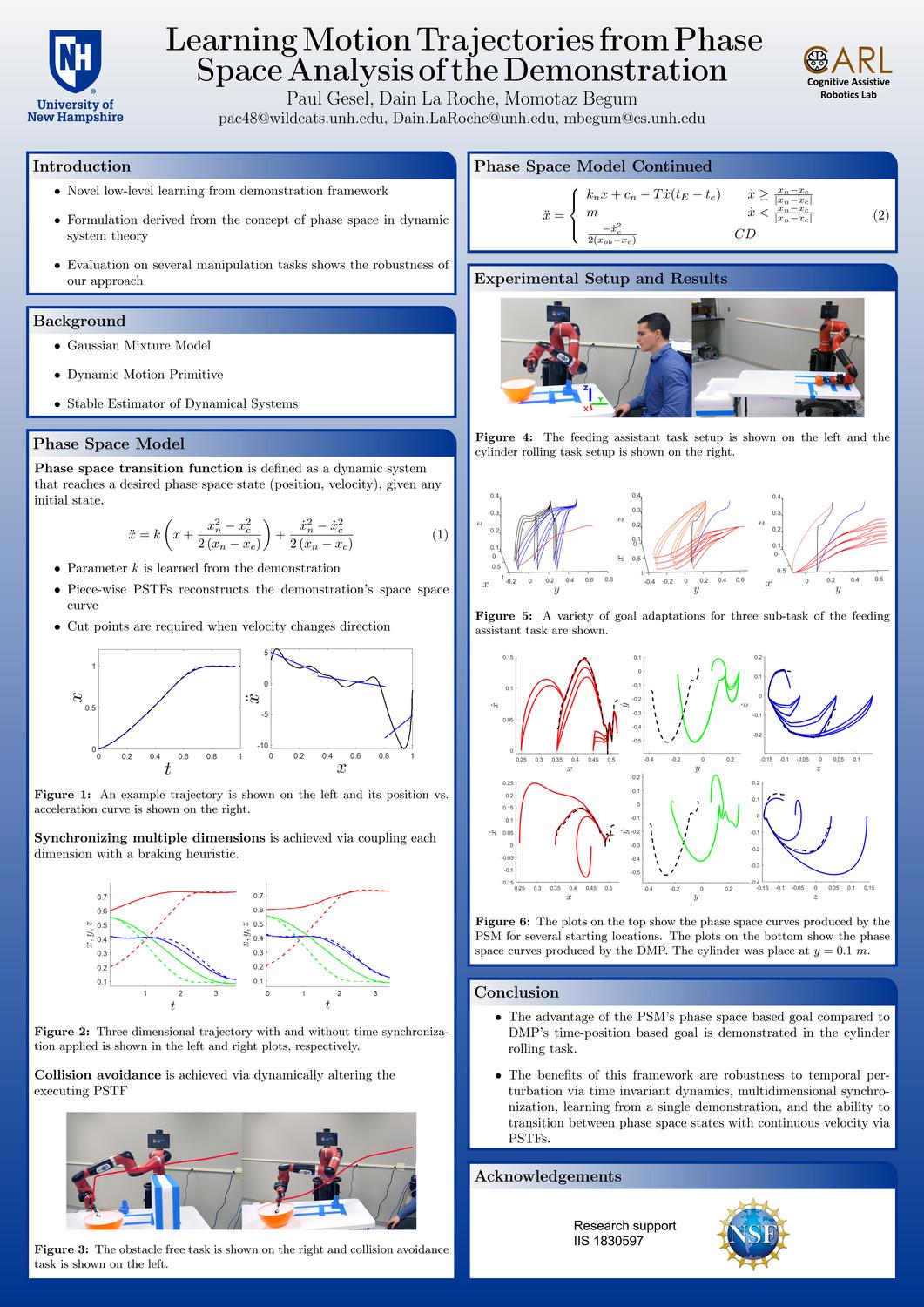
Learning Motion Trajectories from Phase Space Analysis of the Demonstration
Poster
Preview Converted Images may contain errors
Abstract
A major goal of learning from demonstration is task generalization via observation of a teacher. We propose a novel framework for learning motion from a single demonstration. Our approach reconstructs the demonstrated trajectory’s phase space curve via a linear piece wise regression method. We approximate dynamics of trajectory segments with linear time invariant equations, each yielding closed form solutions. We show convergence to desired phase space states via an energy-based analysis. The robustness of the model is evaluated on a robot for a sequential trajectory task. Additionally, we show the advantages that the phase space model has over the dynamic motion primitive for a kinematic based task.
Authors
| First Name |
Last Name |
|
Momotaz
|
Begum
|
|
Dain
|
La Roche
|
|
Paul
|
Gesel
|
Leave a comment
Submission Details
Conference GRC
Event Graduate Research Conference
Department Computer Science (GRC)
Group Poster Presentation
Added April 12, 2020, 7:50 p.m.
Updated April 13, 2020, 8:19 a.m.
See More Department Presentations Here