Title:
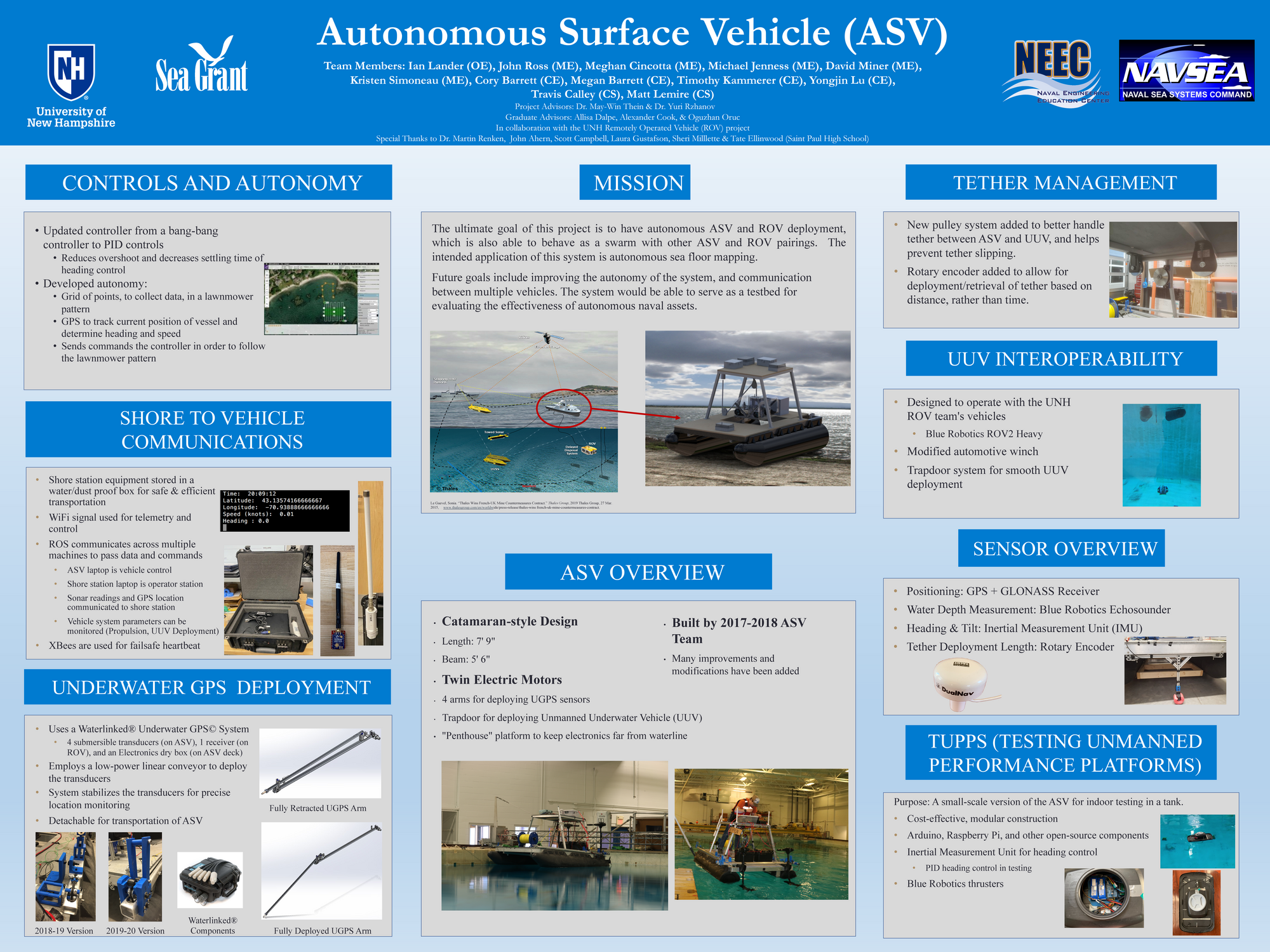
Autonomous Surface Vehicle (ASV)
Poster
Preview Converted Images may contain errors
Abstract
The Autonomous Surface Vehicle (ASV) team works in conjunction with the Remotely Operated Vehicle (ROV) team to develop and test autonomous control systems, and vehicles for multiple marine platforms. The final mission is to demonstrate inter-operability between surface and subsurface vehicles for the purpose of seafloor mapping. This project is funded by the Naval Engineering Education Consortium (NEEC) through the Naval Undersea Warfare Center Division Keyport, in Keyport, Washington.
Authors
| First Name |
Last Name |
|
Matt
|
Lemire
|
|
Travis
|
Calley
|
|
Yongjin
|
Lu
|
|
Timothy
|
Kammerer
|
|
Megan
|
Barrett
|
|
Cory
|
Barrett
|
|
Kristen
|
Simoneau
|
|
David
|
Miner
|
|
Michael
|
Jenness
|
|
Meghan
|
Cincotta
|
|
Ian
|
Lander
|
|
John
|
Ross
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Ocean Engineering (ISE)
Added April 27, 2020, 3:26 p.m.
Updated April 27, 2020, 3:27 p.m.
See More Department Presentations Here