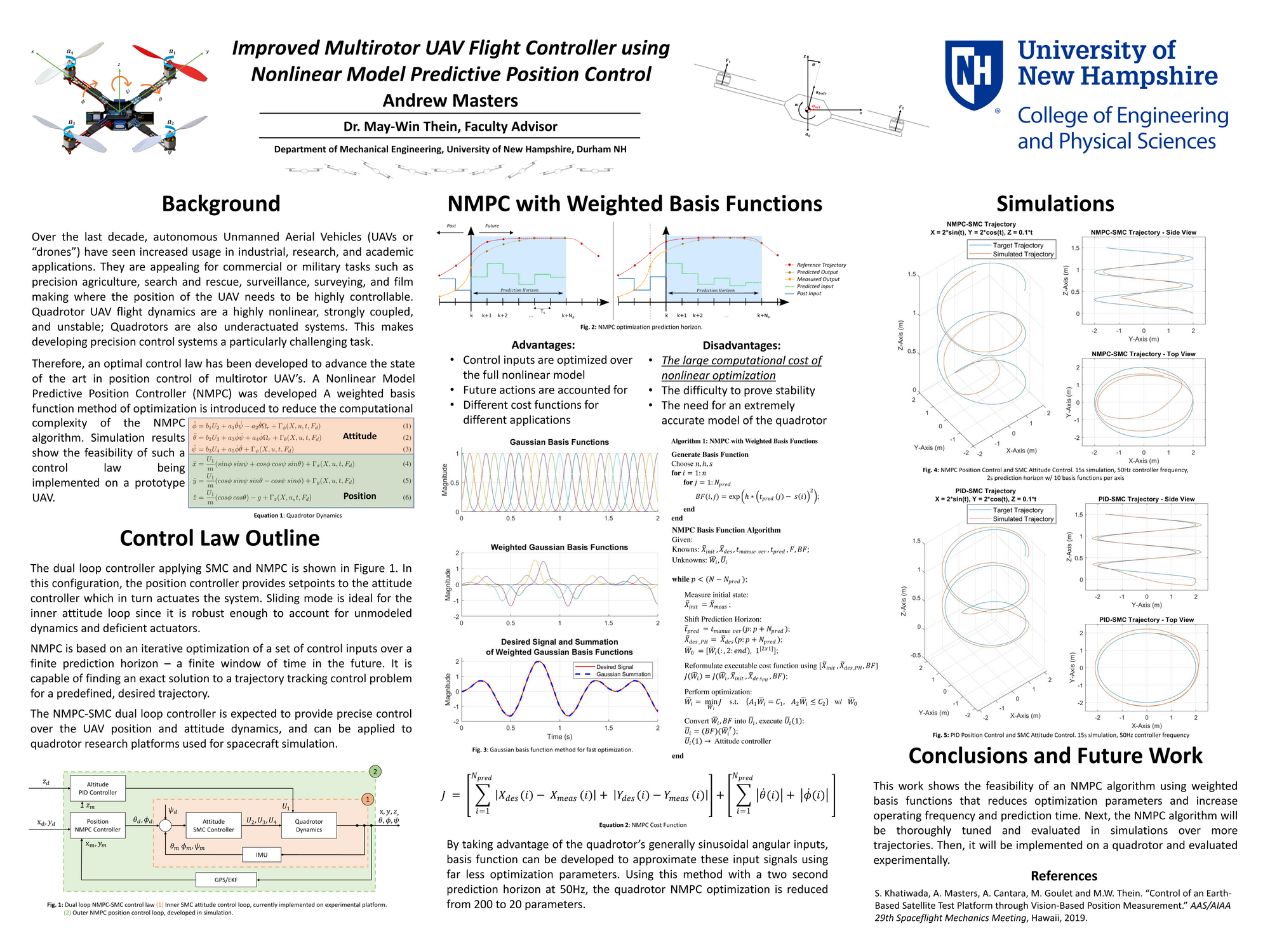
Over the last decade, autonomous Unmanned Aerial Vehicles (UAVs or “drones”) have seen increased usage in industrial, research, and academic applications. Multirotor UAVs – specifically quadrotors – are commonly used due to their high maneuverability, utility, and accessibility. This makes multirotors appealing for commercial or military tasks such as precision agriculture, search and rescue, surveillance, surveying, and film making where the position of the UAV needs to be highly controllable. Quadrotor UAV flight dynamics are a highly nonlinear, strongly coupled, and unstable; Quadrotors are also underactuated systems. This makes developing precision control systems a particularly challenging task.
Therefore, an optimal control law has been developed to advance the state of the art in position control of multirotor UAV’s. A Nonlinear Model Predictive Position Controller (NMPC) was developed in a dual loop with a Sliding Mode Attitude Controller (SMC) designed and implemented in previous work. A weighted basis function method of optimization is introduced to reduce the computational complexity of the NMPC algorithm and to reduce the time required to compute longer prediction horizon control trajectories. Simulation results show the feasibility of such a control law being implemented on a prototype UAV.
Authors
First Name
Last Name
Andrew
Masters
File Count: 2
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)