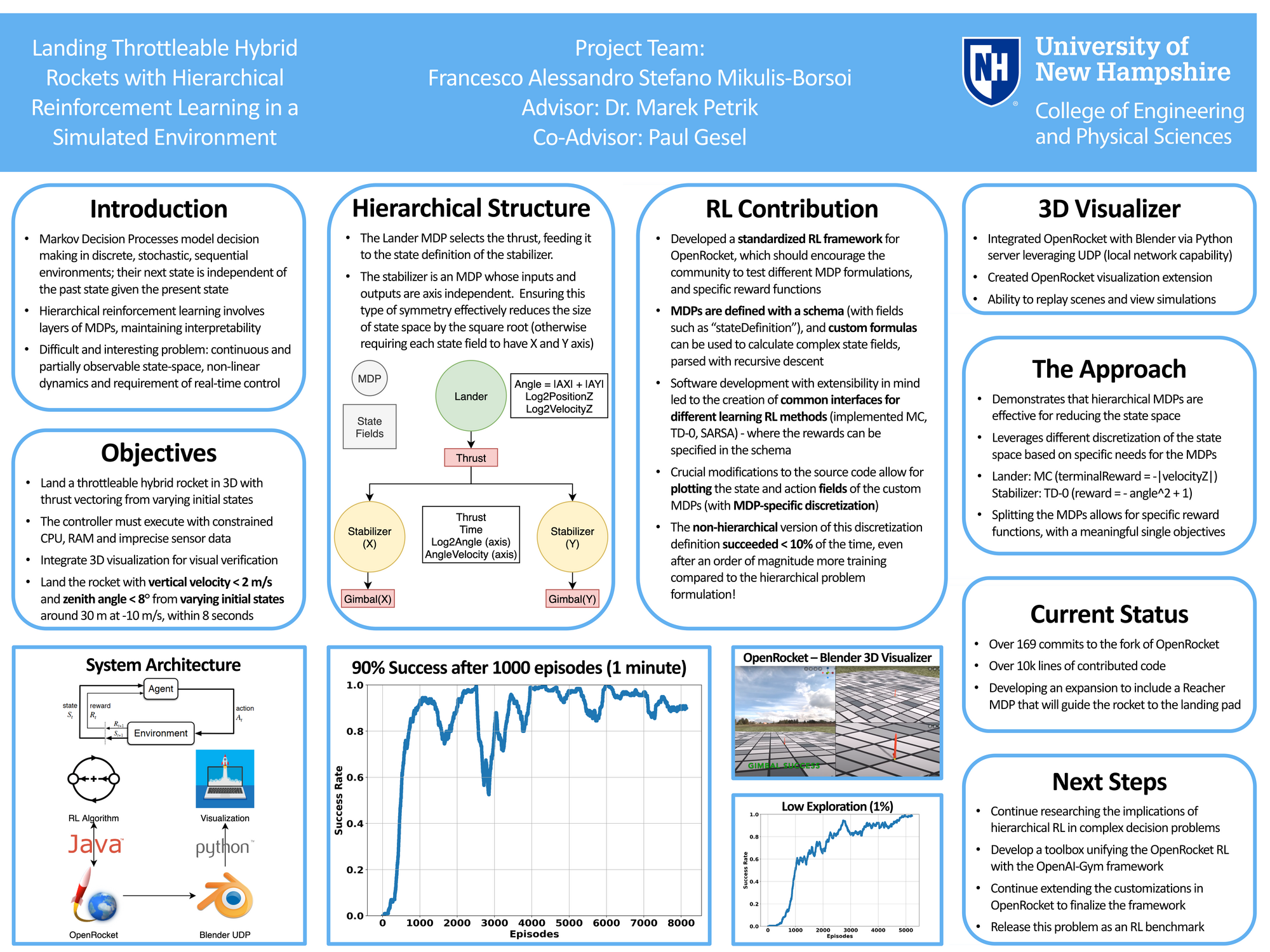
The objective of this project is to create a control system that can land vertically at a predefined coordinate location in a simulated 3-dimensional environment. Self-landing rockets have been theorized over the past century but until 2015, no one had successfully completed a stable re-entry with a thrust-landing. The system must be able to solve the problem with reasonable initial conditions, around a starting altitude of 30 m, an initial velocity around -10 m/s and variable initial angles and angle angle velocities around the x and y axis. The rocket must land upright, at low velocity. We will solve this problem with Reinforcement Learning (RL), extending the OpenRocket source code (an open-source Rocket Simulator). Other individuals have analyzed the performance comparison between MPC and RL methods, such as R. Ferrante [1], but in most cases the analysis is approached in a 2-dimensional environment, with the aid of lateral thrusters. We have shown that training coupled MDPs (Markov Decision Processes) in parallel - and having each MDP specialize in a single objective (e.g. vertical landing) - can be used to achieve a common objective!
Authors
First Name
Last Name
Francesco
Mikulis-Borsoi
File Count: 2
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)