Title:
Autonomous Micromouse
Poster
Preview Converted Images may contain errors
Abstract
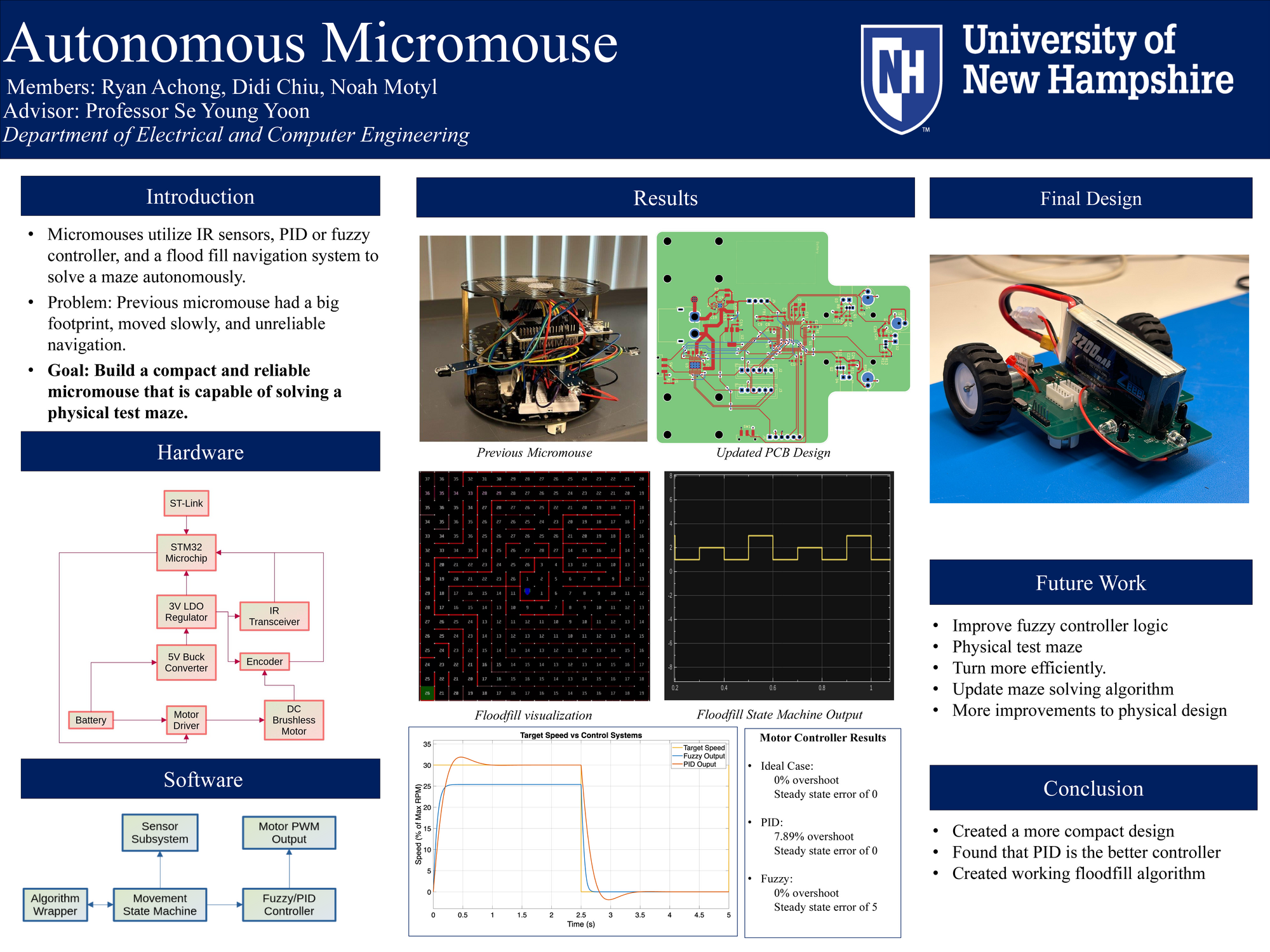
This project focuses on the design and hardware implementation of a Micromouse autonomous robot intended for maze navigation and path planning. The goal was to improve upon a previous system that suffered from a distributed hardware layout, unreliable wiring, and insufficient documentation. To address these issues, all electronic components were consolidated onto a single custom printed circuit board (PCB), significantly reducing complexity and improving system integration and reliability.
The system includes a microcontroller-based control platform, motor driver circuitry, and onboard sensing for wall detection using infrared or optical sensors. These sensors are intended to provide real-time feedback for navigation within a maze environment. The hardware design prioritizes compactness, modularity, and ease of future programming and debugging.
Although the physical system was fully assembled, software implementation and full autonomous operation were not completed due to programming limitations at the time of the project. As a result, no experimental maze-solving trials or performance evaluations were conducted. However, the completed hardware provides a stable and well-documented foundation for future development, including firmware integration, path-planning algorithms, and closed-loop motor control.
Overall, this work establishes a robust embedded hardware platform for a Micromouse system, ready for future software integration and autonomous testing.
Authors
| First Name |
Last Name |
|
Noah
|
Motyl
|
|
Didi
|
Chiu
|
|
Ryan
|
Achong
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Electrical & Computer Engineering (ISE)
Group Electrical and Computer Engineering - Sensing and Action in the Real World
Added April 19, 2026, 11:04 a.m.
Updated April 19, 2026, 11:05 a.m.
See More Department Presentations Here