Title:
AIOLOS: Autonomous Inventory Or Laboratory Operations Suite
Poster
Preview Converted Images may contain errors
Abstract
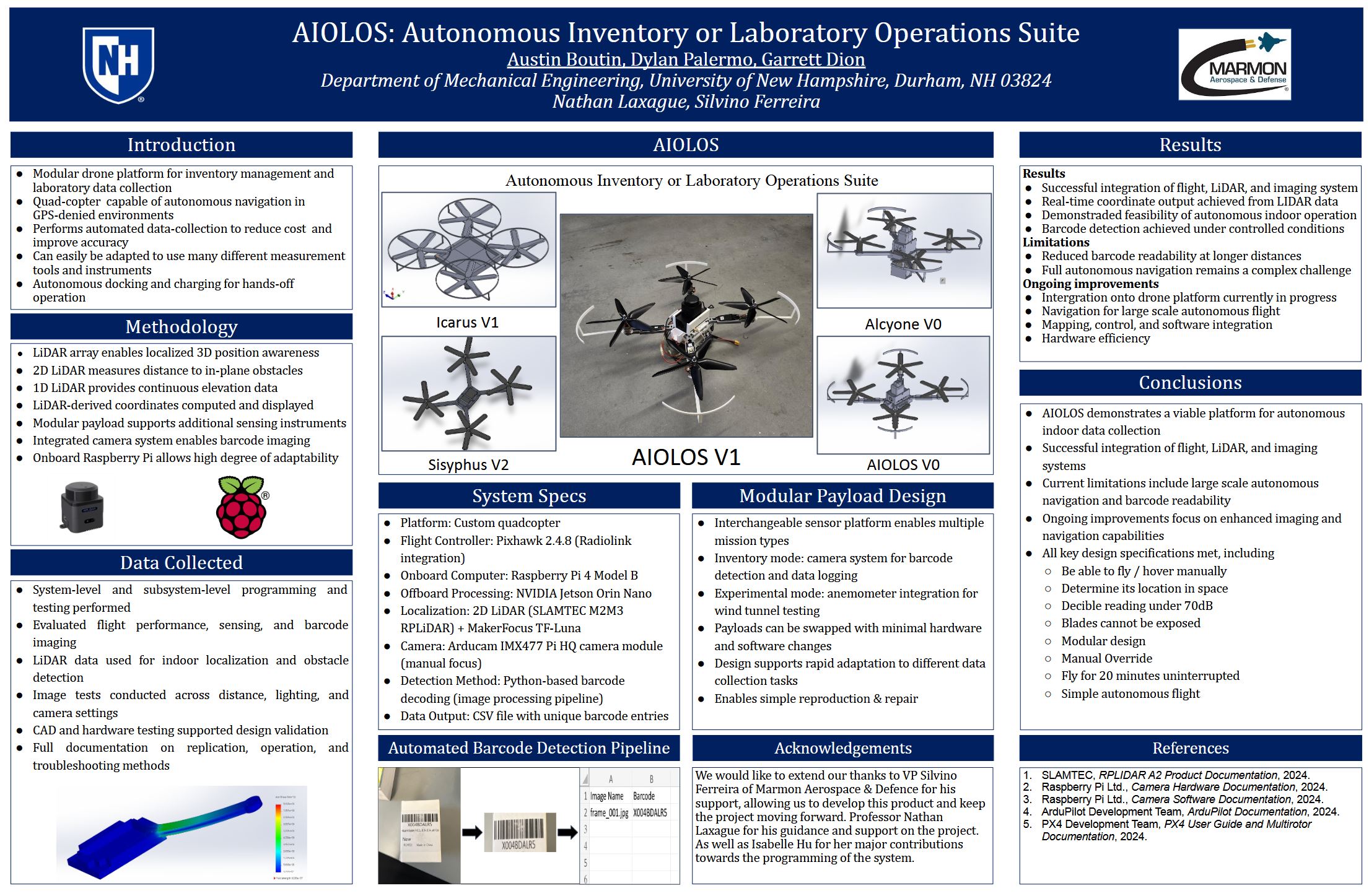
AIOLOS (Autonomous Inventory or Laboratory Operations Suite) is a modular quadcopter platform designed for autonomous operation in GPS-denied environments using LiDAR-based sensing. The system was developed for indoor applications, including warehouse inventory management for Marmon Aerospace and Defense and experimental data collection in the University of New Hampshire Flow Physics Facility wind tunnel.
The platform emphasizes a fully modular architecture, enabling rapid assembly, maintenance, and integration of custom data acquisition payloads. Core system components include a Pixhawk flight controller, LiDAR for localization and obstacle detection, offboard image processing, and an autonomous docking and charging station for extended operation.
Development began from a ground-up design, resulting in successful manual flight, reliable communication between LiDAR sensors and the flight controller, and implementation of a flexible hardware framework. Initial image processing capabilities and docking functionality were also demonstrated. Ongoing work focuses on achieving fully autonomous navigation and improving sensing and data collection performance in complex indoor environments.
Authors
| First Name |
Last Name |
|
Dylan
|
Palermo
|
|
Garrett
|
Dion
|
|
Austin
|
Boutin
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Mechanical Engineering (ISE)
Group Mechanical Engineering- Faculty Sponsored
Added April 16, 2026, 11:38 a.m.
Updated April 21, 2026, 12:40 a.m.
See More Department Presentations Here