Title:
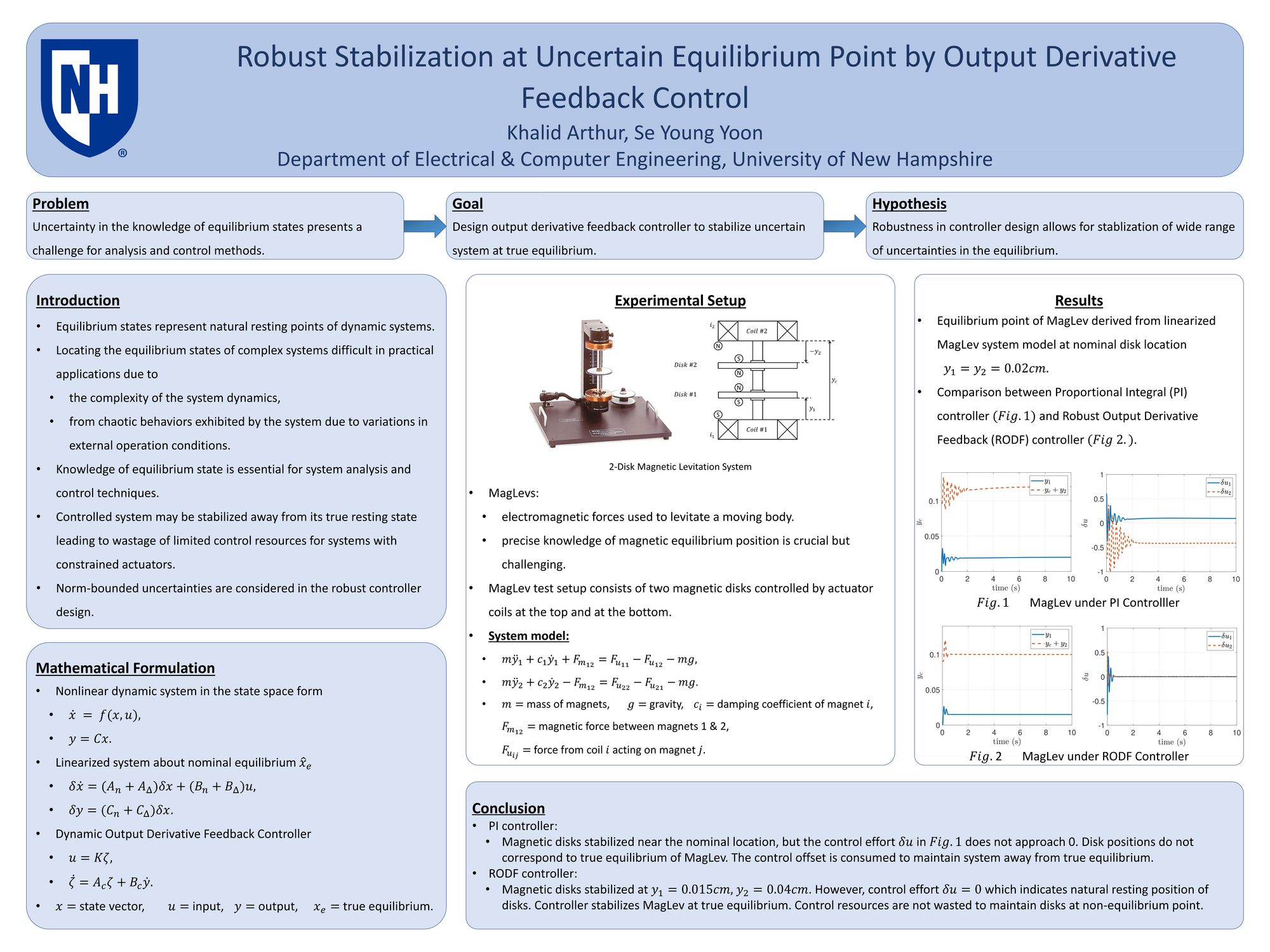
Robust Stabilization at Uncertain Equilibrium by Output Derivative Feedback Control
Poster
Preview Converted Images may contain errors
Abstract
The problem of stabilizing dynamic systems with unknown or uncertain equilibrium states is studied. We propose an output derivative feedback control scheme for the local stabilization of such a system at its true equilibrium state. We consider the case where norm-bounded uncertainties are present in the system model to derive robust stability conditions in linear matrix inequality form. A practical example involving a magnetic levitation system, in which two disks are to be levitated at an unknown magnetic equilibrium, demonstrates the effectiveness of the output derivative feedback controller.
Authors
| First Name |
Last Name |
|
Se Young
|
Yoon
|
|
Khalid
|
Arthur
|
Leave a comment
Submission Details
Conference GRC
Event Graduate Research Conference
Department Electrical and Computer Engineering (GRC)
Group Poster Presentation
Added April 16, 2020, 1:49 a.m.
Updated April 16, 2020, 4:11 p.m.
See More Department Presentations Here