Title:
Marine and Naval Technological Advancements for Robotic AutonomY (MANTA RAY) KRILL
Poster
Preview Converted Images may contain errors
Abstract
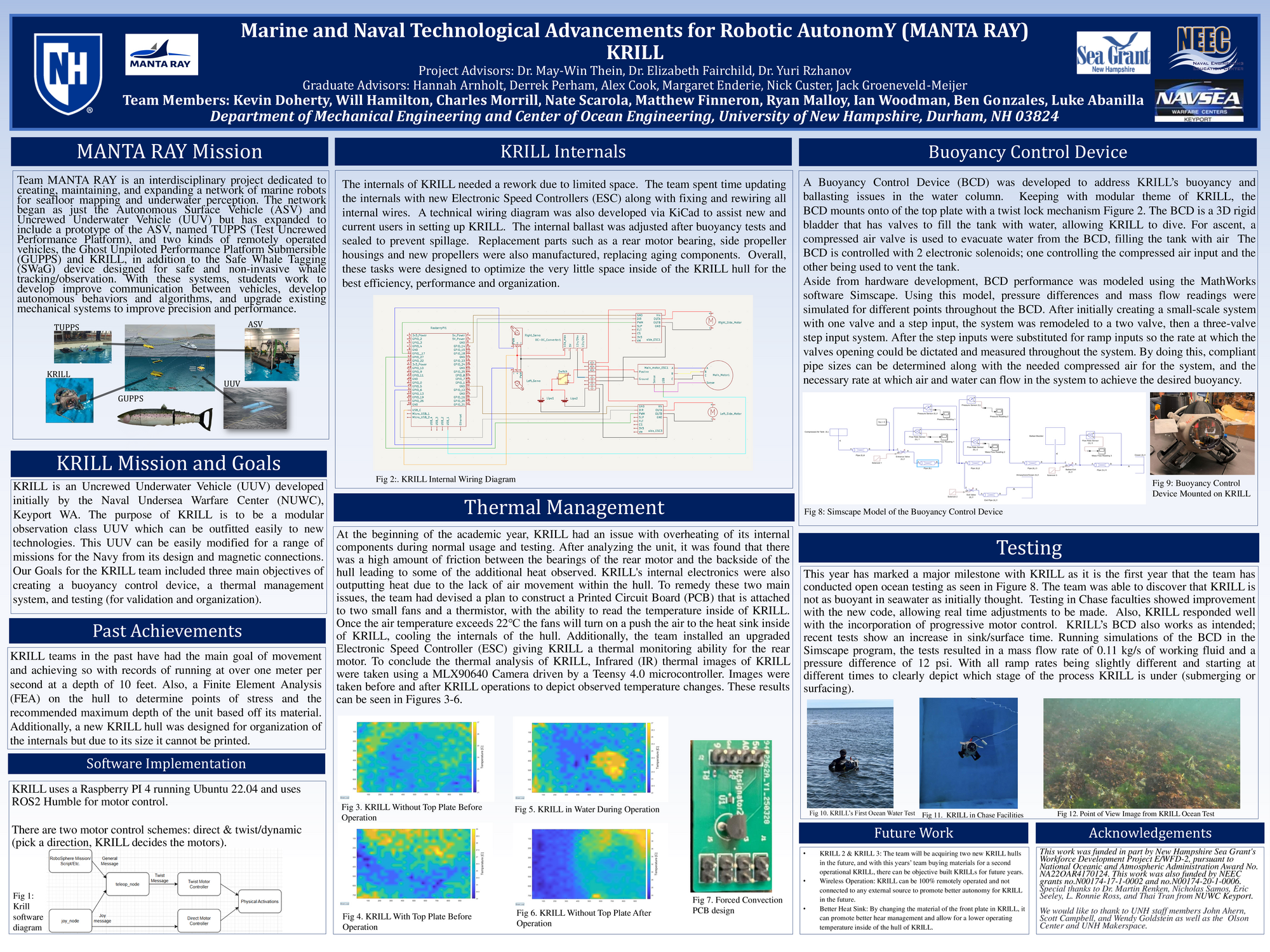
KRILL is an Uncrewed Underwater Vehicle (UUV), designed by the Naval Underwater Warfare Center (NUWC) in Keyport Washington. KRILL is designed to serve a range of missions due to its modular and magnetic design, giving it the ability to exchange and replace components with ease. These missions can range from navigation, surveillance, or propulsion by being outfitted with different components. This year’s team set major goals for the UUV based off of the previous team achieved a milestone of linear motion with KRILL, by recording speeds up to one meter per second at a depth of ten feet of freshwater at the Chase Ocean Engineering building. This year’s progress includes designing and installing a Buoyancy Control Device (BCD), replacing and upgrading internal components and software for optimizing the space inside of the KRILL hull, and incorporating better thermal management practices to counteract the overheating that KRILL seemed to have at the beginning of the academic year after running simple testing programs.
Authors
| First Name |
Last Name |
|
Ben
|
Gonzales
|
|
Ian
|
Woodman
|
|
Ryan
|
Malloy
|
|
Matthew
|
Finneron
|
|
Nate
|
Scarola
|
|
Charles
|
Morill
|
|
Will
|
Hamilton
|
|
Kevin
|
Doherty
|
|
Luke
|
Abanilla
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Ocean Engineering (ISE)
Group Ocean Engineering
Added April 21, 2025, 6:39 p.m.
Updated April 21, 2025, 6:40 p.m.
See More Department Presentations Here