Title:
ET NavSwarm
Poster
Preview Converted Images may contain errors
Award:
Winner
Award:
Winner
Abstract
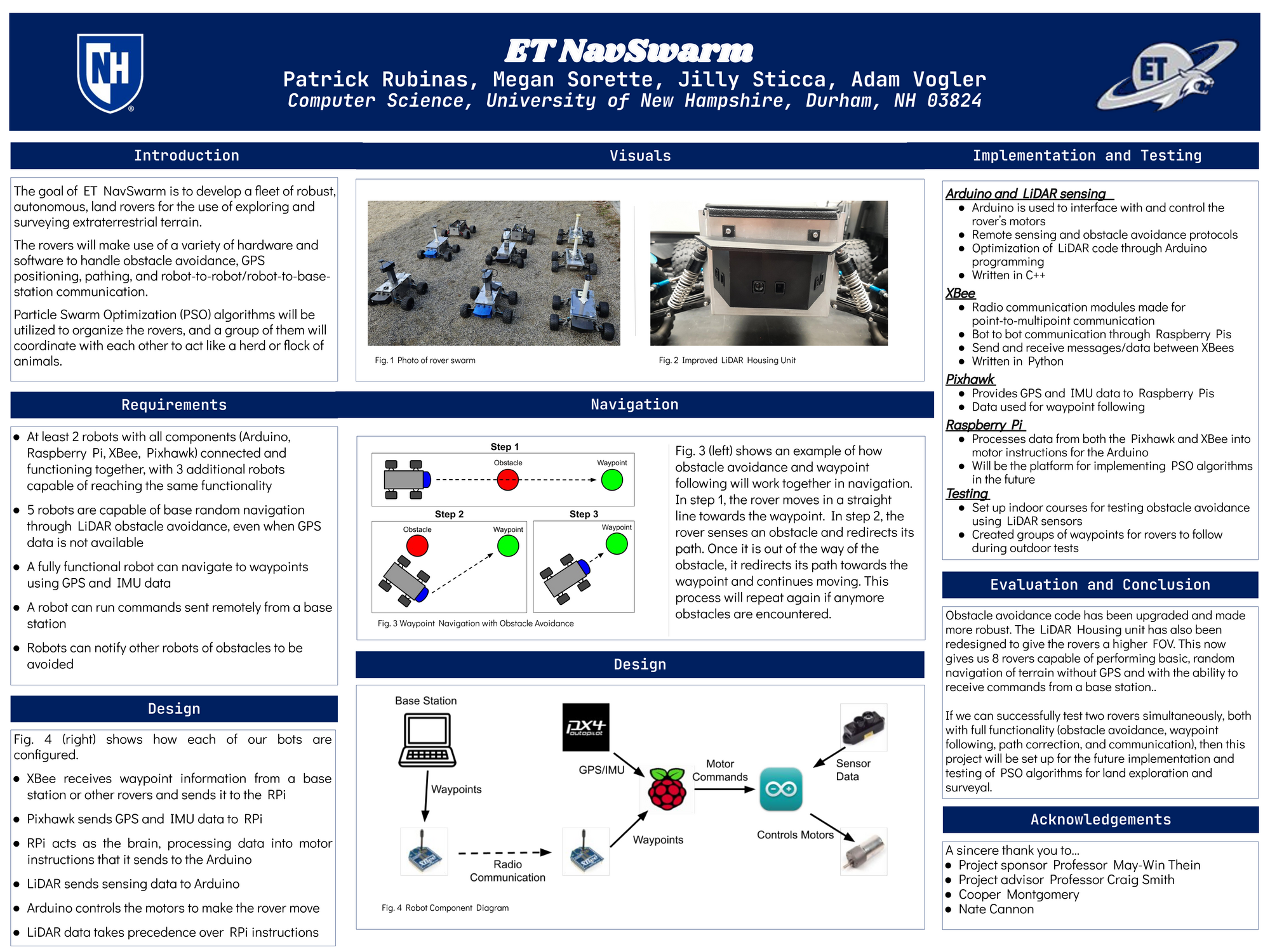
The ET NavSwarm project aims to develop a fleet of autonomous rovers for surveying extraterrestrial terrain. These rovers will also be used as a platform for UNH graduate students to test particle swarm optimization (PSO) algorithms, which mimic the way animals flock or herd, to facilitate the efficient exploration of terrain. The rover’s components consist of Arduinos, LiDAR sensors, PixHawks, XBees, and Raspberry Pi’s. The Arduinos determine how to spin the motors using both data coming in from the LiDAR sensors and instructions from the Pi. The Pi gets GPS and IMU data from the PixHawk units, as well as messages from other robots or the base station from the XBee. The Pi then processes this data and sends motor instructions to the Arduino. Last year’s group managed to get one robot navigating through a pre-planned mission on Boulder field using GSP, IMU, and LiDAR data. Our group will be successful this year if we can get two robots to navigate a similar mission together while communicating the presence of obstacles to each other. Additionally, we would aim to have five total robots with these capabilities by the end of the project.
Authors
| First Name |
Last Name |
|
Patrick
|
Rubinas
|
|
Megan
|
Sorette
|
|
Adam
|
Vogler
|
|
Jillian
|
Sticca
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Computer Science (ISE)
Group Infrastructure
Added April 21, 2025, 5:42 p.m.
Updated April 21, 2025, 5:43 p.m.
See More Department Presentations Here