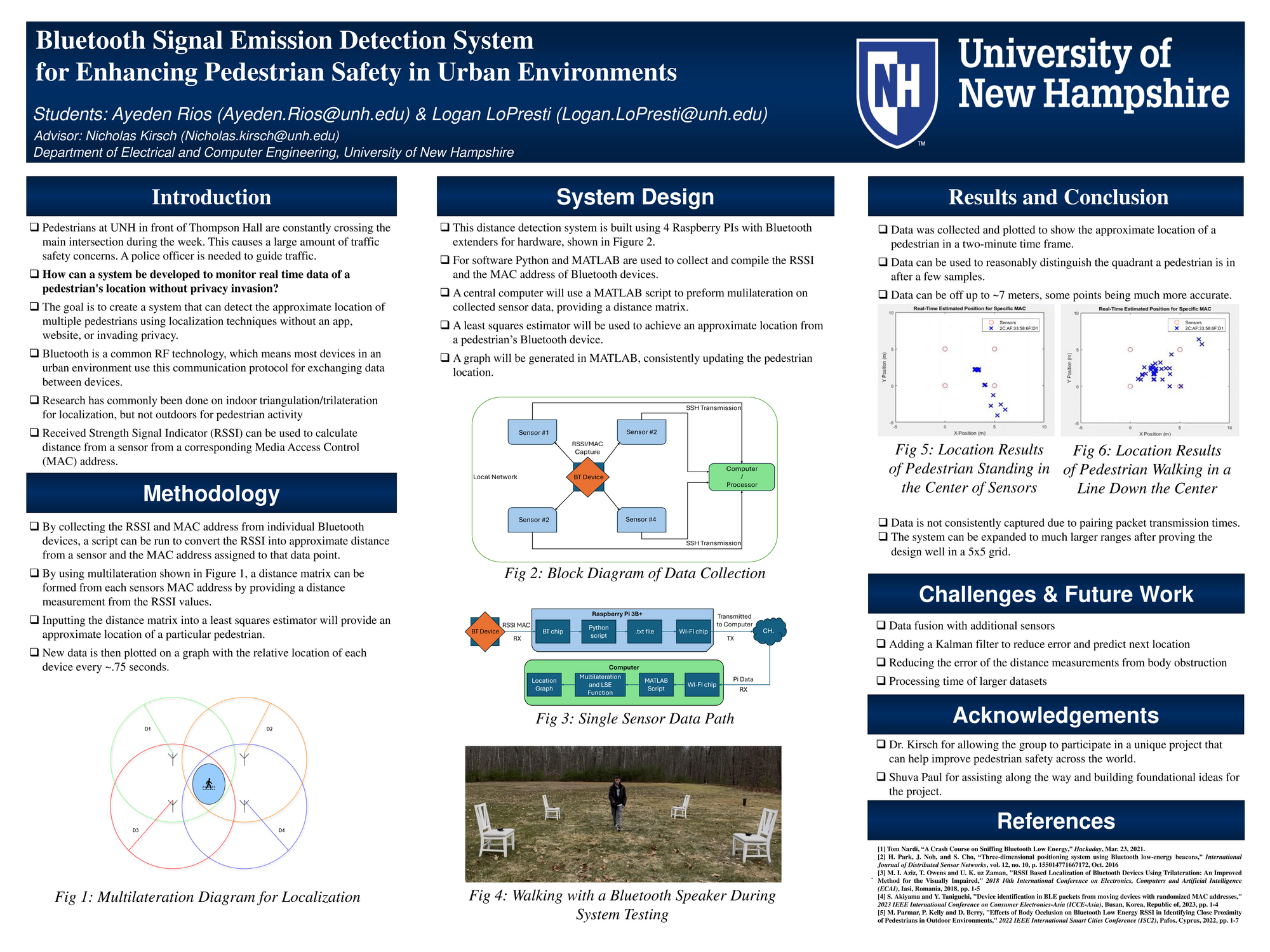
Pedestrian safety has become a vital concern in front of Thompson Hall at the University of New Hampshire. A police officer is needed to guide traffic, but humans can only see so much in a crowded area. Many pedestrians in an urban environment like UNH carry a phone, watch, laptop, or other device that uses the Bluetooth protocol to connect to another piece of technology. Applications on a user device such as GPS or other location services are not always available and need additional connection before data can be collected, which rules these out. This project aims to use a network of Raspberry Pi’s for Bluetooth packet sniffing to localize pedestrians within an area using received strength indicator values and public media access control addresses. The key difference this project presents is the use of four sensors collecting distance data and processing it through a MATLAB multilateration algorithm to estimate the approximate location of multiple Bluetooth devices. The data will be captured and processed at approximately 0.75-second intervals, with a relative accuracy of 7 meters or less. This project will show the results in a 5x5 plot for visual inspection of accuracy and reliability, but the location data can be further transmitted to vehicles for pedestrian avoidance.
Authors
First Name
Last Name
Ayeden
Rios
Logan
LoPresti
File Count: 2
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Electrical and Computer Engineering (ISE)