Title:
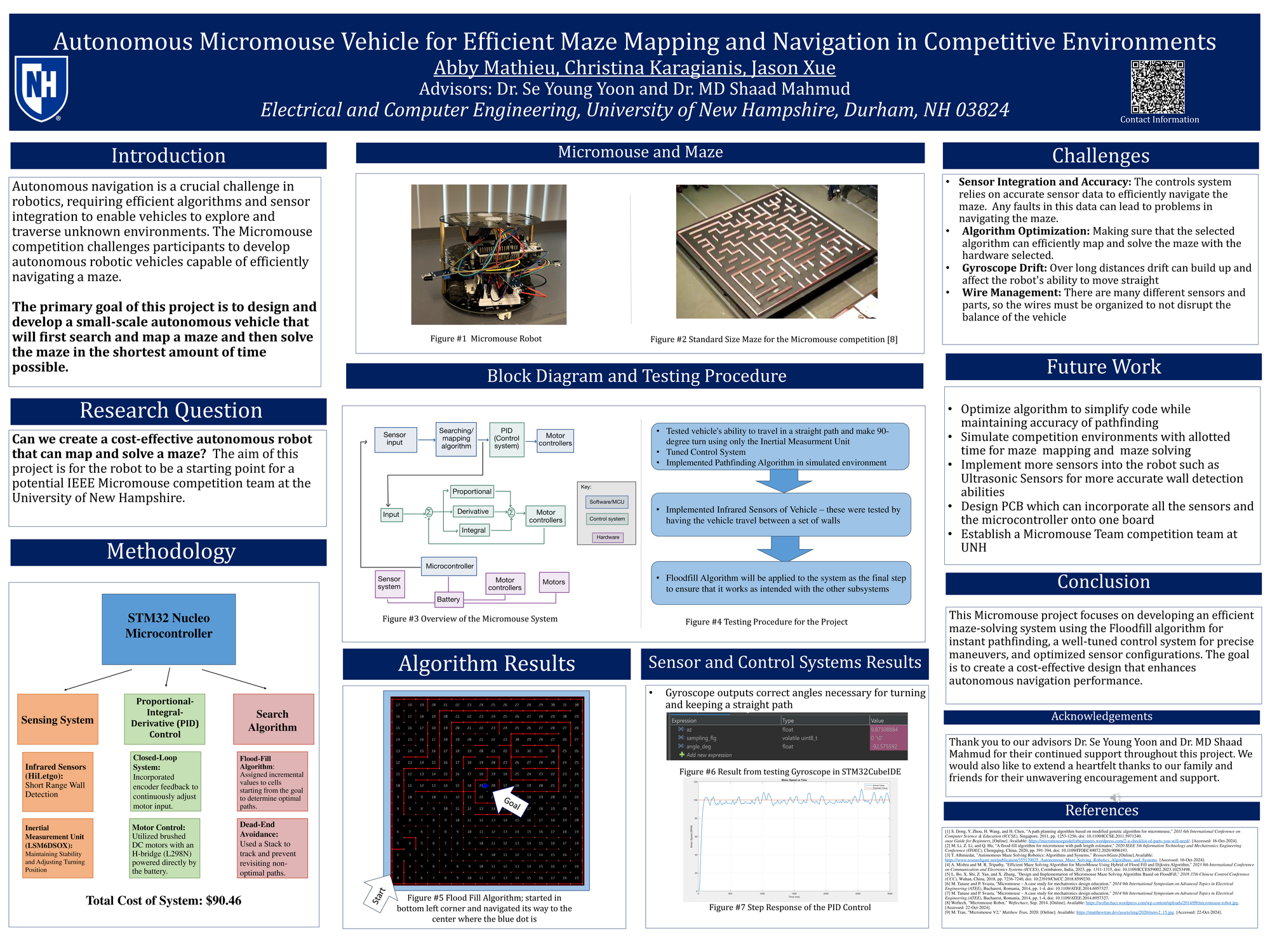
Autonomous Micromouse Vehicle for Efficient Maze Mapping and Navigation in Competitive Environments
Poster
Preview Converted Images may contain errors
Abstract
Autonomous navigation is a crucial challenge in robotics, requiring efficient algorithms and sensor integration to enable vehicles to explore and traverse unknown environments. The Micromouse competition challenges participants to develop autonomous robotic vehicles capable of efficiently navigating a maze. The primary goal of this project is to design and develop a small-scale autonomous vehicle that will first search and map a maze and then solve the maze in the shortest amount of time possible, while also being as cost effective as possible. To solve this challenge, the vehicle utilizes three different subsystems, a sensing system, a control system, and a search algorithm. For the sensing system, infrared sensors are used to detect obstacles, and an inertial measurement unit is used for stability and turning. A PID control system is employed to control overall movement of the vehicle by regulating both linear velocity and angular orientation. The search algorithm implemented was the Floodfill algorithm, which determines the possible shortest path to the target within the maze. By implementing these three subsystems a prototype has been developed to traverse and map an unknown maze environment.
Authors
| First Name |
Last Name |
|
Jason
|
Xue
|
|
Abby
|
Mathieu
|
|
Christina
|
Karagianis
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Electrical and Computer Engineering (ISE)
Group Electrical and Computer Engineering
Added April 15, 2025, 4:13 p.m.
Updated April 15, 2025, 4:14 p.m.
See More Department Presentations Here