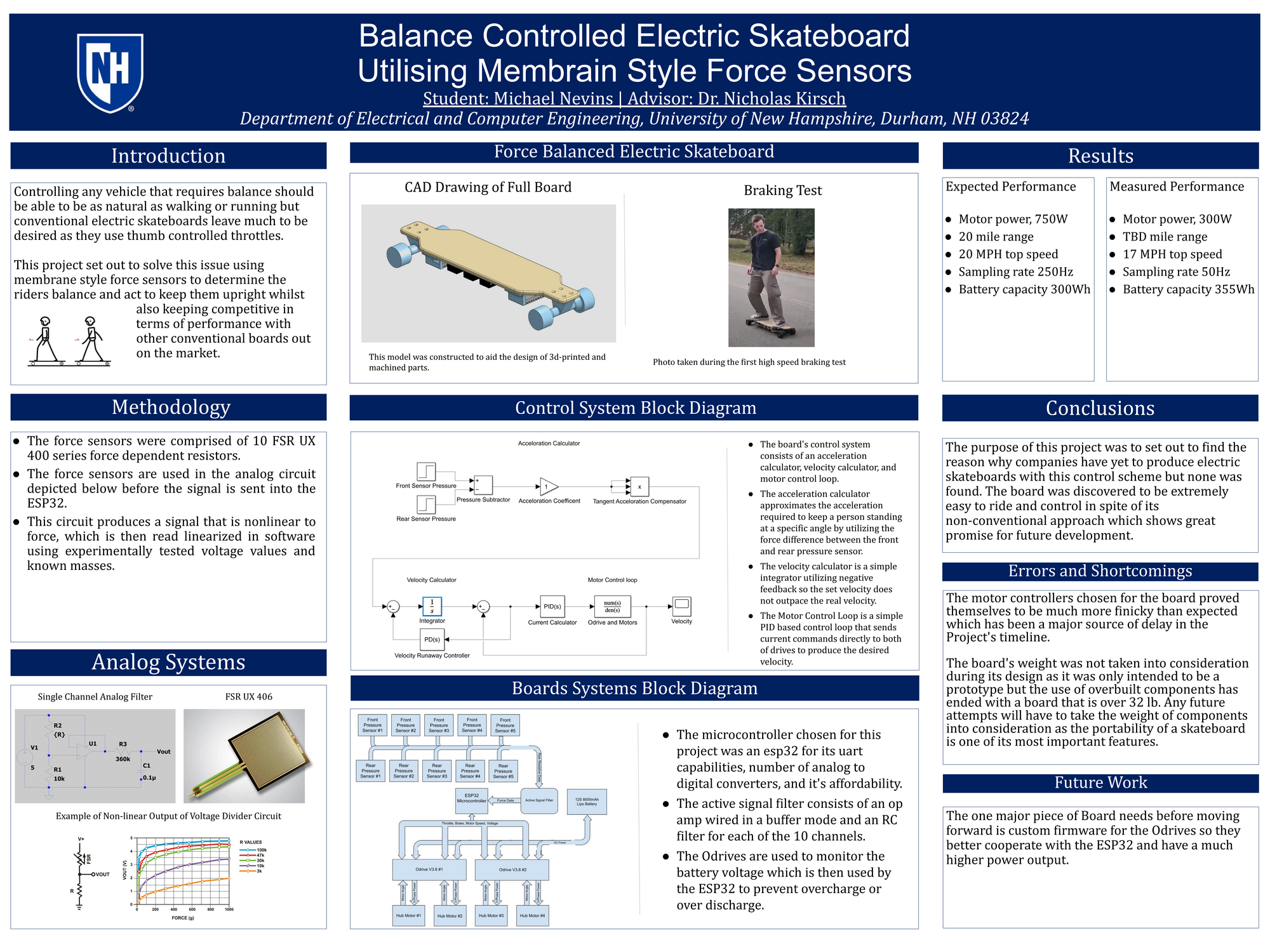
Over the last few years, personal electric vehicles have exploded in popularity. Electric bicycles, electric unicycles, even electric roller skates have begun to pop up everywhere. However there is one personal electric vehicle that has been around since the beginning, and yet contains a flaw that has persisted in countless models. Almost all PEVs have a natural response to balancing. In an electric unicycle, when the rider leans forward, the unicycle accelerates. When the rider leans back, the unicycle decelerates. Electric skateboards, however, rely on a handheld controller for acceleration and deceleration, which makes the experience feel disconnected and clunky. The Force Balancing Electric Skateboard is a project that seeks to solve this flaw for conventional electric skateboards. Utilizing membrane style force sensors to measure the difference in force between the rider's feet, it then estimates the rider's lean angle. This data is then sent through two control loops, which sets the throttle and keeps the rider balanced.
Authors
First Name
Last Name
Michael
Nevins
File Count: 2
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Electrical and Computer Engineering (ISE)