Title:
Quad-X Swarm
Poster
Preview Converted Images may contain errors
Abstract
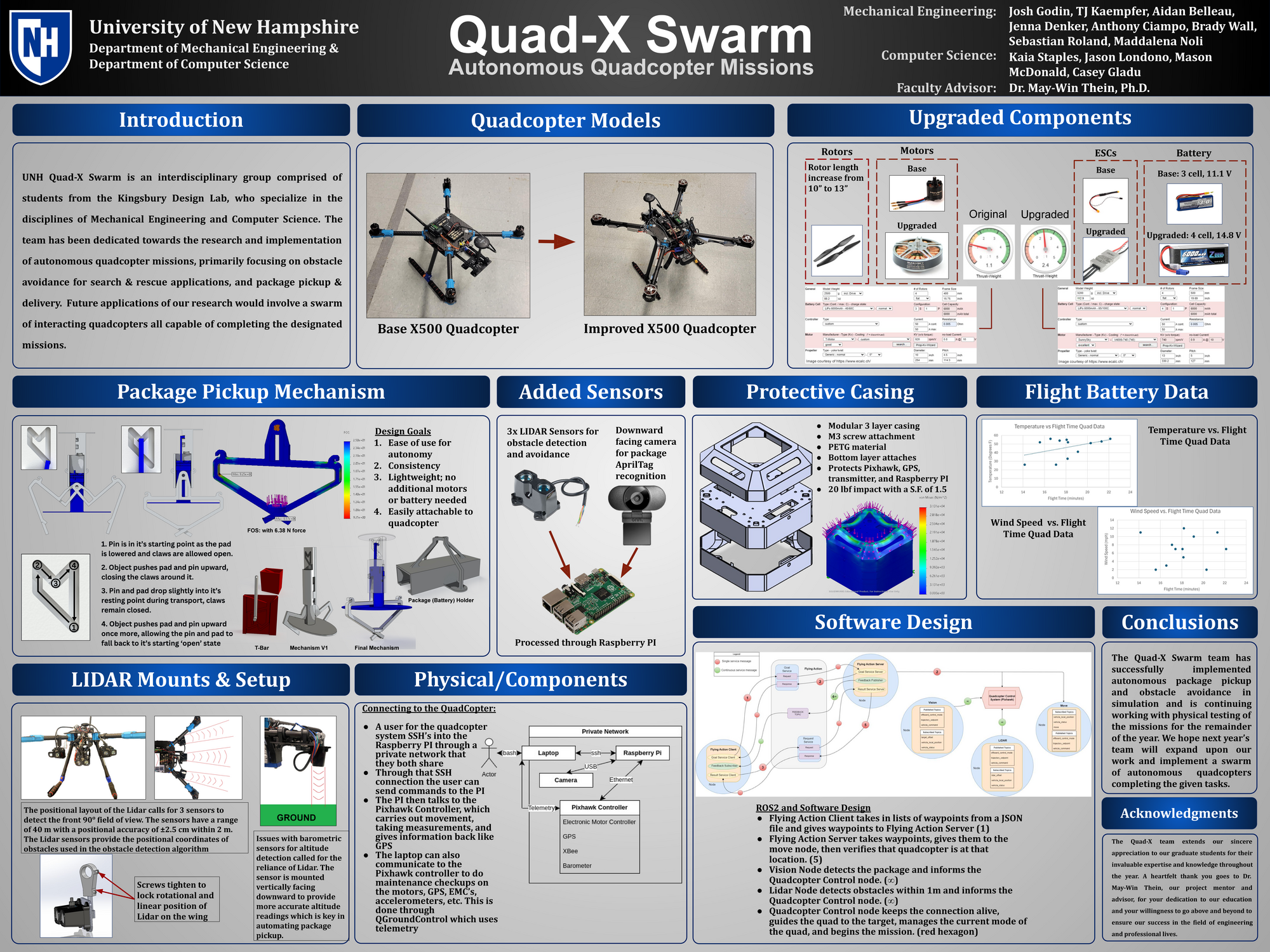
The Quad-X Swarm team presents an autonomous quadcopter system designed for two missions: picking up and delivering a package, and search and rescue. Using an array of lidar sensors and a vertical facing camera, the quadcopters are able to complete the two missions autonomously. The quadcopters were fitted with all the hardware needed to perform the two missions, including a mechanism for picking up the package, a case to protect the electronics, and upgraded motor components to provide them with increased thrust to be able to pick up the package. The package pickup mechanism had to be as light as possible, while being simple enough that it could be actuated autonomously without the need for additional electrical components. The electronics had to be enclosed in order to protect them. Algorithms were designed and implemented to detect the package and move toward it autonomously, as well as obstacle avoidance for the search and rescue misison. Both missions were able to be demonstrated virtually in simulation, while physical testing is still ongoing.
Authors
| First Name |
Last Name |
|
Casey
|
Gladu
|
|
Jason
|
Londono
|
|
Mason
|
McDonald
|
|
Kaia
|
Staples
|
|
Maddalena
|
Noli
|
|
Sebastian
|
Roland
|
|
Brady
|
Wall
|
|
Anthony
|
Ciampo
|
|
Jenna
|
Denker
|
|
Josh
|
Godin
|
|
TJ
|
Kaempfer
|
|
Aidan
|
Belleau
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Mechanical Engineering (ISE)
Group Competition & Clubs
Added April 18, 2024, 3 p.m.
Updated April 18, 2024, 3:01 p.m.
See More Department Presentations Here