Title:
MANTA RAY - Marine and Naval Technological Advancements for Robotic AutonomY Autonomous Surface Vehicle 2 (ASV2)
Poster
Preview Converted Images may contain errors
Abstract
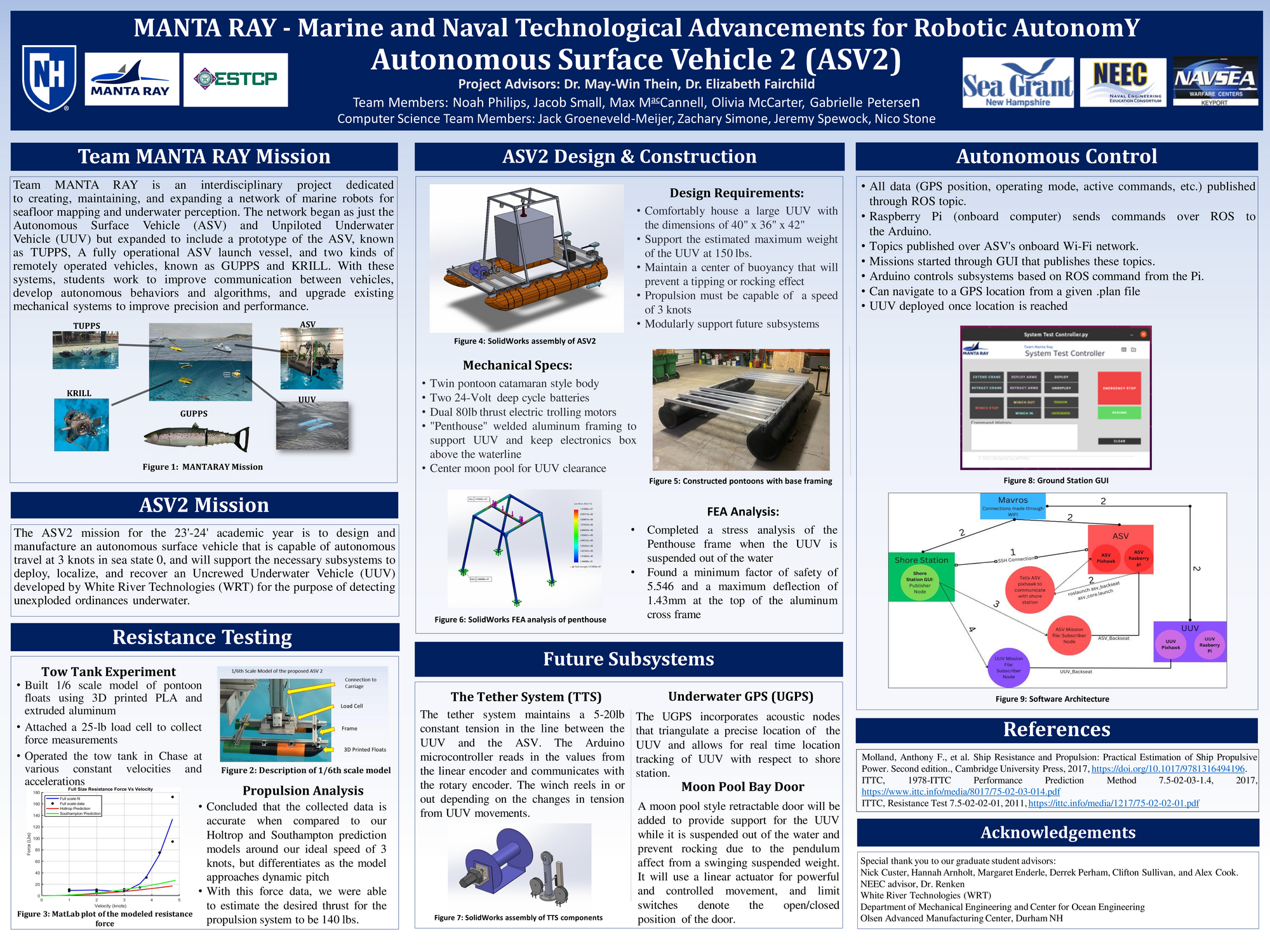
Team MANTA RAY is an interdisciplinary project dedicated to creating, maintaining, and expanding a network of marine robots for seafloor mapping and underwater perception. The network began as just the Autonomous Surface Vehicle (ASV) and Unpiloted Underwater Vehicle (UUV) but expanded to include a prototype of the ASV, known as TUPPS, A fully operational ASV launch vessel, and two kinds of remotely operated vehicles, known as GUPPS and KRILL. With these systems, students work to improve communication between vehicles, develop autonomous behaviors and algorithms, and upgrade existing mechanical systems to improve precision and performance. The ASV2 mission for the 23'-24' academic year is to design and manufacture an autonomous surface vehicle that will be capable of autonomous travel at 3 knots in sea state 0, and will support the necessary subsystems to deploy, localize, and recover an Uncrewed Underwater Vehicle (UUV) developed by White River Technologies (WRT) for the purpose of detecting unexploded ordinances underwater.
Authors
| First Name |
Last Name |
|
Nico
|
Stone
|
|
Jeremy
|
Spewock
|
|
Zachary
|
Simone
|
|
Gabrielle
|
Petersen
|
|
Olivia
|
McCarter
|
|
Max
|
MacCannell
|
|
Jacob
|
Small
|
|
Noah
|
Phillips
|
|
Jack
|
Groeneveld-Meijer
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Ocean Engineering (ISE)
Added April 18, 2024, 1:56 p.m.
Updated April 18, 2024, 1:57 p.m.
See More Department Presentations Here