Title:
Novel Reference Trajectories for Improved Marine Surface Vehicle Path Following
Poster
Preview Converted Images may contain errors
Abstract
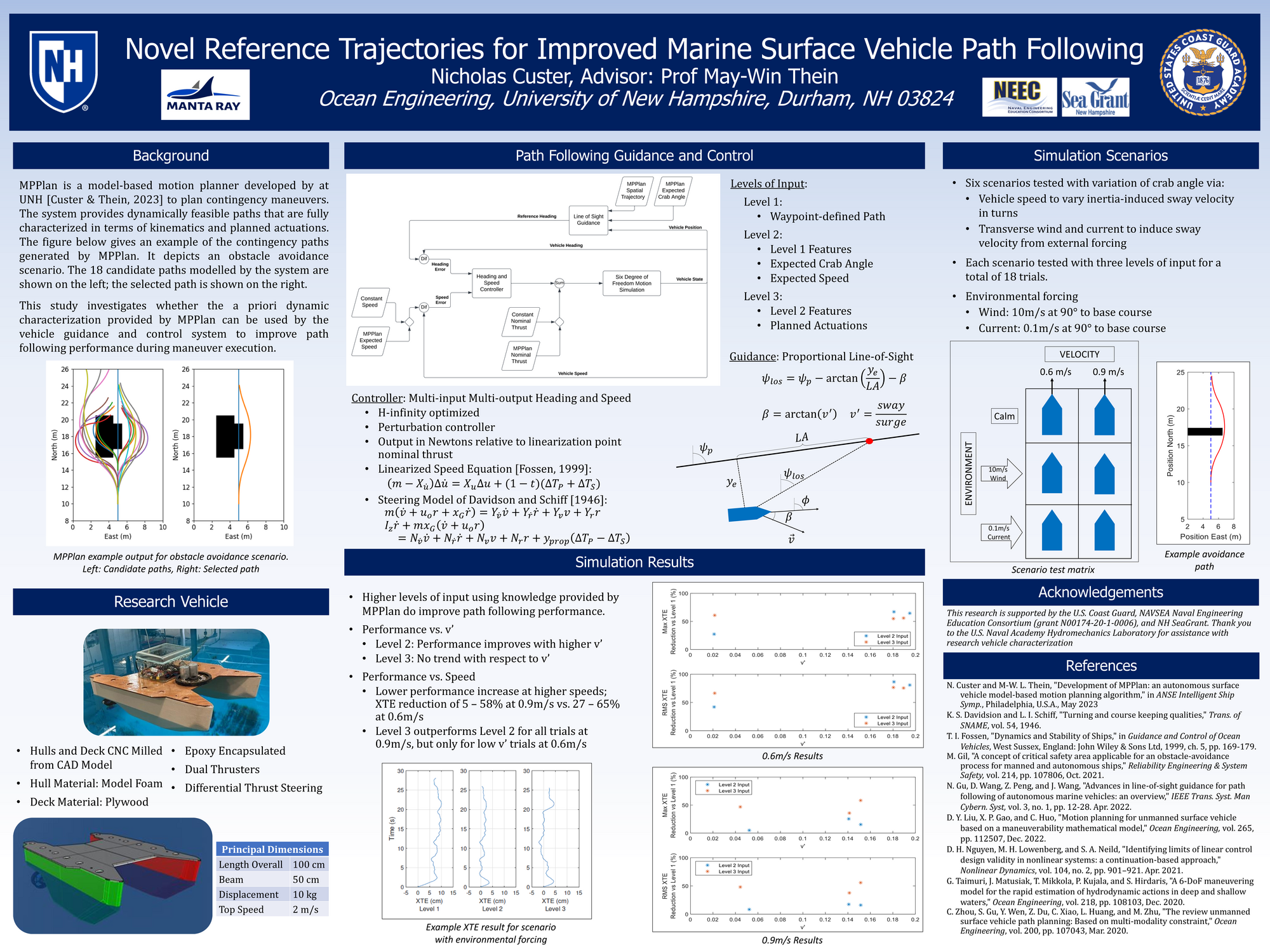
Model Predictive Planner (MPPlan) is a model-based motion planning system developed at the University of New Hampshire to provide autonomous vehicles with real-time path updates. MPPlan provides appropriate waypoints to define the planned surface trajectories similar to that of other conventional path planners and, furthermore, provides additional reference trajectories for a wide range of kinematic states and planned control actuations. This study investigates utilizing this additional a priori knowledge to improve path following controller performance. Here, a path following system that combines proportional line-of-sight guidance with a heading and speed controller is implemented on a micro-ASV using three different levels of kinematic and kinetic input. The system performance is studied across a range of vehicle speeds and environmental forcing conditions, thereby inducing variations in the ASV crab angle in order to study its impact on path-following performance. It is found that the proposed path following system using reference trajectories to take into account the expected surge velocity, crab angle, and nominal thrust actuations, reduces maximum cross track error (XTE) by up to 55% compared to that of a baseline path-following scheme. Providing only the surge velocity and crab angle references, the method reduces maximum cross track error by up to 60% versus the baseline scheme. The ability of information uniquely provided by MPPlan to significantly reduce vehicle XTE during unsteady maneuvers, in turn, reduces the need for large safety envelopes and allows for tighter vehicle navigation in the proximity of potential hazards (e.g., obstacles).
Authors
| First Name |
Last Name |
|
Nicholas
|
Custer
|
Leave a comment
Submission Details
Conference GRC
Event Graduate Research Conference
Department Ocean Engineering (GRC)
Group Poster Presentation
Added April 15, 2024, 10:10 a.m.
Updated April 15, 2024, 10:11 a.m.
See More Department Presentations Here