Title:
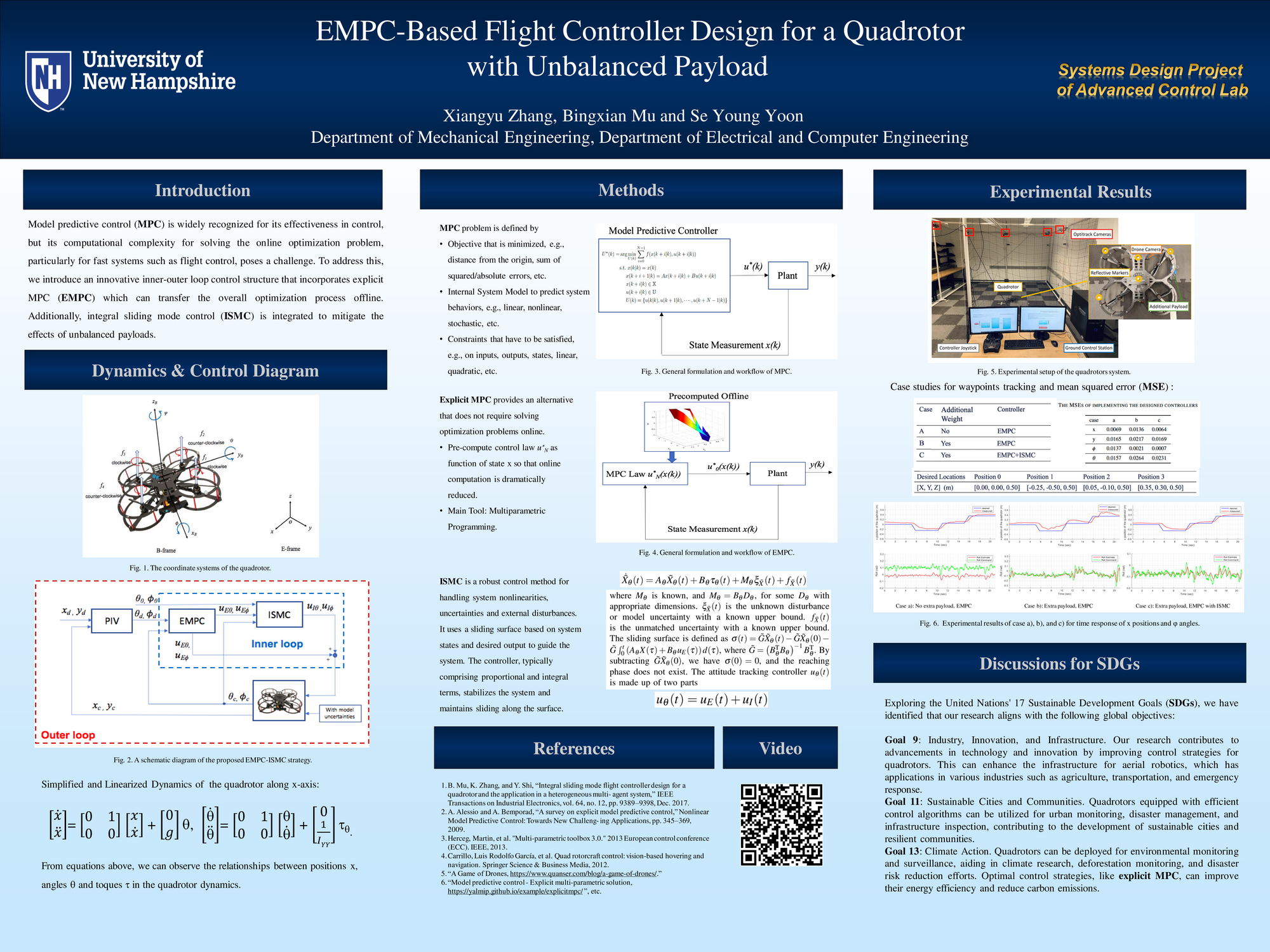
EMPC-Based Flight Controller Design for a Quadrotor with Unbalanced Payload
Poster
Preview Converted Images may contain errors
Abstract
Model predictive control (MPC) is widely recognized for its effectiveness in control, but its computational complexity for solving the online optimization problem, particularly for fast systems such as flight control, poses a challenge. To address this, we introduce an innovative inner-outer loop control structure that incorporates explicit MPC (EMPC) which can transfer the overall optimization process offline. Additionally, integral sliding mode control (ISMC) is integrated to mitigate the effects of unbalanced payloads.
Authors
| First Name |
Last Name |
|
Xiangyu
|
Zhang
|
Leave a comment
Submission Details
Conference GRC
Event Graduate Research Conference
Department Systems Design (GRC)
Group Poster Presentation
Added April 15, 2024, 12:33 a.m.
Updated April 15, 2024, 12:33 a.m.
See More Department Presentations Here