Title:
Quad-X Swarm
Poster
Preview Converted Images may contain errors
Abstract
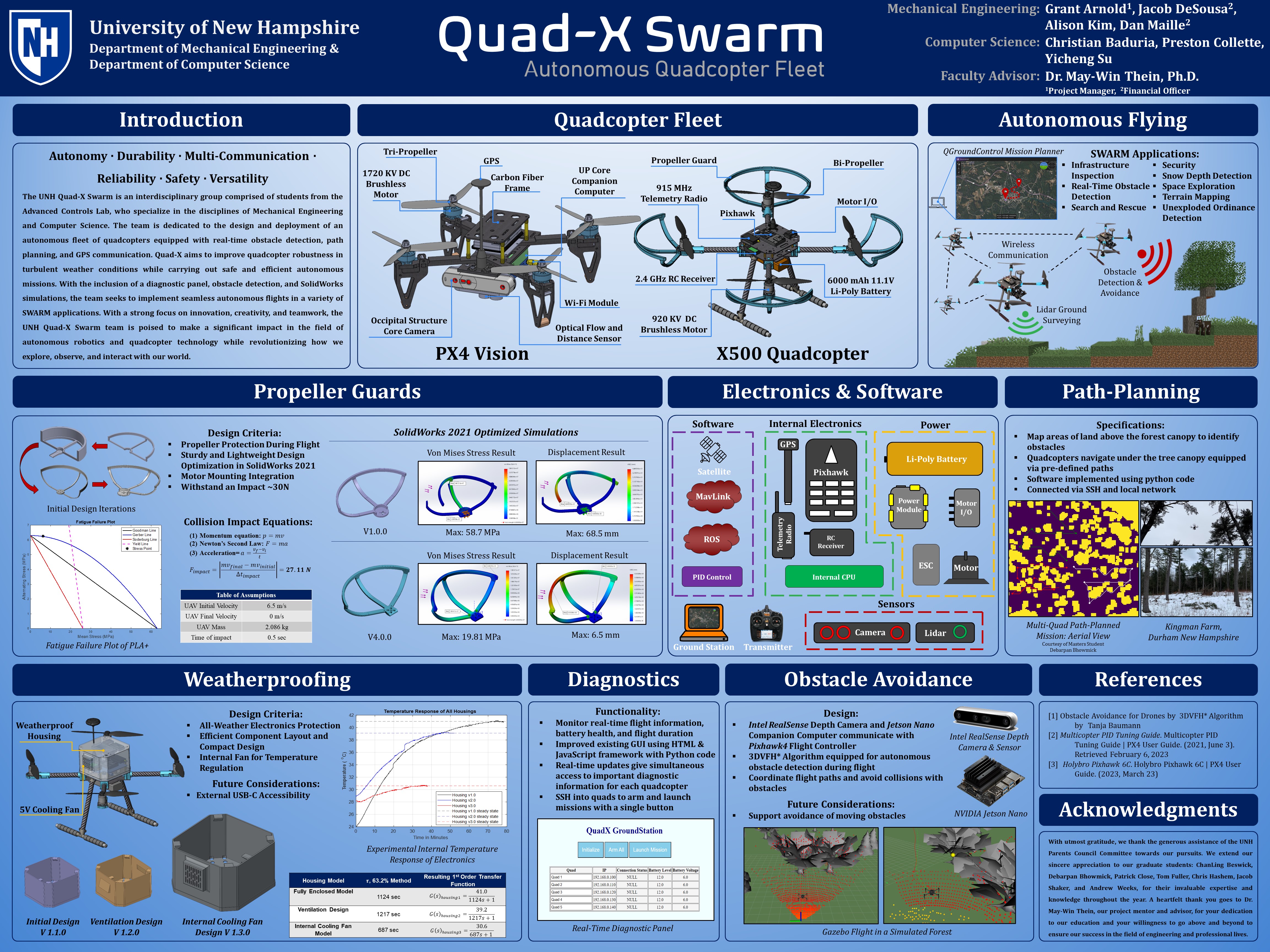
Quad-X SWARM is one of the most technologically advanced Senior Project’s aimed to shape the future of autonomous robotic applications. Our team is an interdisciplinary group consisting of undergraduate students studying Mechanical Engineering and Computer Science along with several Graduate students incorporating the project into their research. Here at the University of New Hampshire, our team is working towards deploying a fully autonomous fleet of quadcopters equipped with real-time object detection, path planning, and high-speed GPS communication. Our technology can be applied to a range of fields including Civil and Environmental infrastructure remote sensing, Unexploded Ordinance Detection, Search and Rescue, and Mapping missions. Our quadcopters can autonomously map areas of land above the forest tree canopy and gather snow depth data on the forest floor all while being equipped with obstacle detection.
The Mechanical Engineering team was tasked to make the quadcopters more robust and advanced for various research applications. Modeling, simulating, designing, fabricating, and testing both propellor guards and waterproof housings were some of the many projects the Mechanical Engineering team has worked on throughout the year. With capabilities of programming autonomous missions, the Computer Science team aimed to address solutions that improve the stability, safety, and troubleshooting capabilities of quadcopter systems across multiple fronts. The team integrated a diagnostic panel to track real-time quadcopter health status such as location, connectivity, and battery status which ultimately makes autonomous swarm missions more robust and efficient.
Quad-X is just one piece of the puzzle in the dynamic ecosystem of autonomous robotic applications. Whether it is ground, surface, air, and space vehicles, UNH Engineering is at the forefront of revolutionizing how we continue to explore, observe, and interact with our world. In the future, our algorithms at Quad-X may be applicable to exploring new ecosystems and planets, so there is no limit to how this team will continue to push the boundaries of autonomous robotic applications in the future.
Authors
| First Name |
Last Name |
|
Yicheng
|
Su
|
|
Preston
|
Collette
|
|
Christian
|
Baduria
|
|
Dan
|
Maille
|
|
Alison
|
Kim
|
|
Jacob
|
DeSousa
|
|
Grant
|
Arnold
|
Leave a comment
Submission Details
Conference URC
Event Interdisciplinary Science and Engineering (ISE)
Department Mechanical Engineering (ISE)
Group Competition & Clubs
Added April 13, 2023, 5:06 p.m.
Updated April 17, 2023, 11:03 a.m.
See More Department Presentations Here