Title:
Autonomous Surface Vehicle Model-Based Motion Planning
Poster
Preview Converted Images may contain errors
Abstract
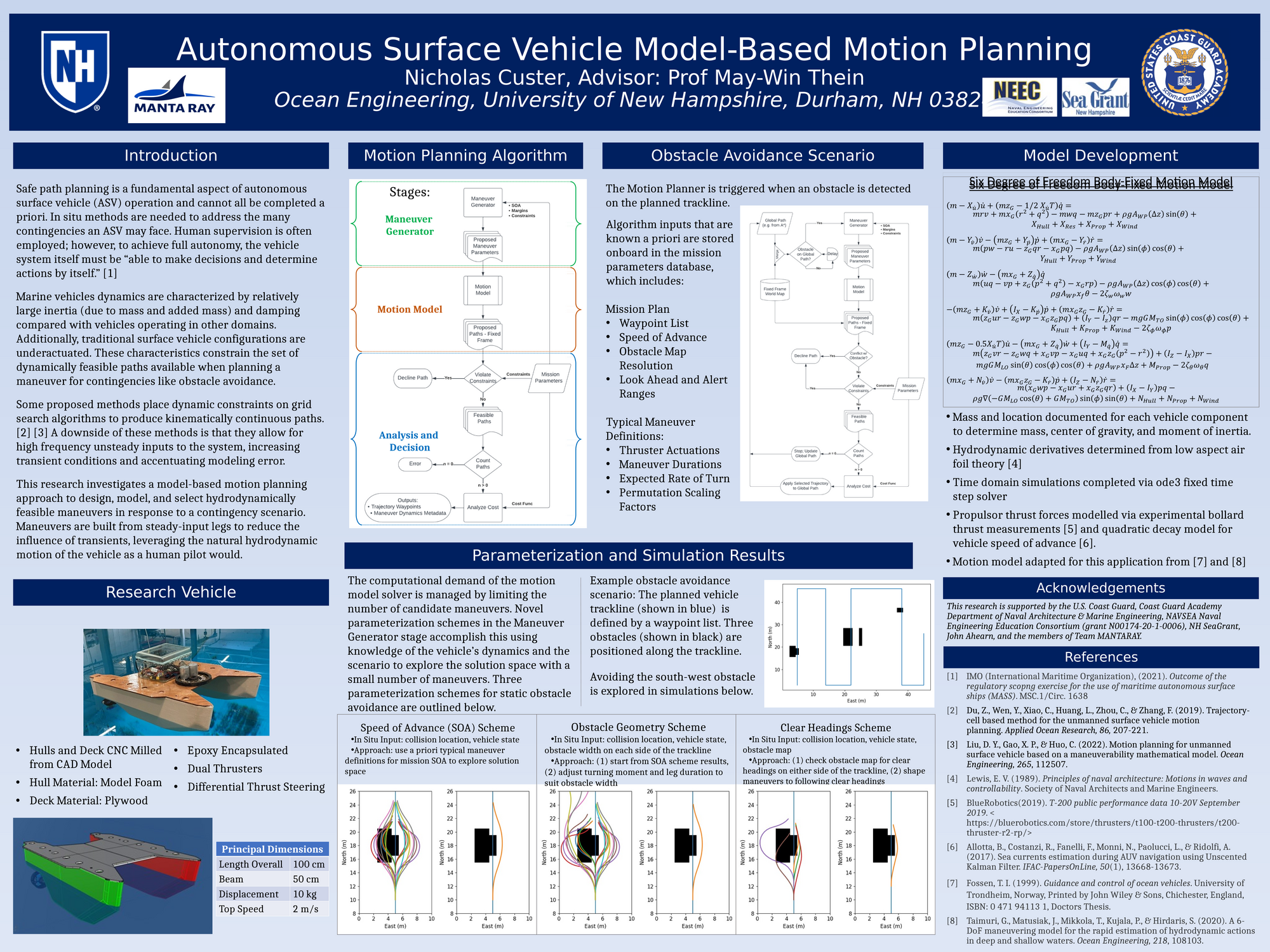
A fundamental aspect of autonomous surface vehicle (ASV) operation is safe path planning. Due to a wide range of contingency scenarios, a priori path planning methods must be supplemented with real-time onboard path deviation capabilities for a fully autonomous system. The dynamics of high inertia underactuated surface vehicles further require path planning that accounts for the vehicle’s hydrodynamics. To meet this need, a model-based motion planning algorithm is proposed. The algorithm utilizes an online motion model and learned knowledge of the vehicle’s maneuvering characteristics to explore hydrodynamically feasible path deviations and select a solution. The algorithm is applied to an obstacle avoidance scenario with three maneuver parameterization schemes. It is analyzed utilizing an exemplar one-meter ten-kilogram microASV similar to various commercial-off-the-shelf uncrewed systems currently in use. Simulations demonstrate the system's ability to plan a hydrodynamically feasible and kinematically continuous path when faced with a static obstacle avoidance scenario. Results indicate an opportunity to improve ASV performance by generating a hydrodynamically feasible and effectively controllable reference trajectory, along with detailed maneuver dynamics that can be used to evaluate the candidate maneuver and by the control layer during execution.
Authors
| First Name |
Last Name |
|
Nicholas
|
Custer
|
Leave a comment
Submission Details
Conference GRC
Event Graduate Research Conference
Department Ocean Engineering (GRC)
Group Poster Presentation
Added April 10, 2023, 12:22 p.m.
Updated April 10, 2023, 12:23 p.m.
See More Department Presentations Here